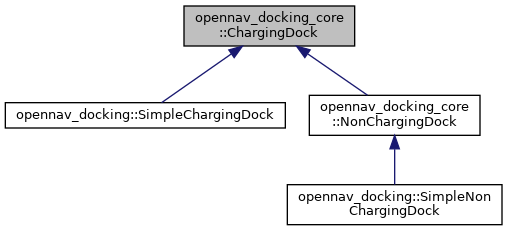
Abstract interface for a charging dock for the docking framework. More...
#include <nav2_docking/opennav_docking_core/include/opennav_docking_core/charging_dock.hpp>
Public Types | |
| using | Ptr = std::shared_ptr< ChargingDock > |
Public Member Functions | |
| virtual | ~ChargingDock () |
| Virtual destructor. | |
| virtual void | configure (const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, const std::string &name, std::shared_ptr< tf2_ros::Buffer > tf)=0 |
| virtual void | cleanup ()=0 |
| Method to cleanup resources used on shutdown. | |
| virtual void | activate ()=0 |
| Method to active Behavior and any threads involved in execution. | |
| virtual void | deactivate ()=0 |
| Method to deactive Behavior and any threads involved in execution. | |
| virtual geometry_msgs::msg::PoseStamped | getStagingPose (const geometry_msgs::msg::Pose &pose, const std::string &frame)=0 |
| Method to obtain the dock's staging pose. This method should likely be using TF and the dock's pose information to find the staging pose from a static or parameterized staging pose relative to the docking pose. More... | |
| virtual bool | getRefinedPose (geometry_msgs::msg::PoseStamped &pose, std::string id)=0 |
| Method to obtain the refined pose of the dock, usually based on sensors. More... | |
| virtual bool | isDocked ()=0 |
| Have we made contact with dock? This can be implemented in a variety of ways: by establishing communications with the dock, by monitoring the the drive motor efforts, etc. More... | |
| virtual bool | isCharging ()=0 |
| Are we charging? If a charge dock requires any sort of negotiation to begin charging, that should happen inside this function as this function will be called repeatedly after the docking loop to check if successful. More... | |
| virtual bool | disableCharging ()=0 |
| Undocking while current is still flowing can damage a charge dock so some charge docks provide the ability to disable charging before the robot physically disconnects. The undocking action will not command the robot to move until this returns true. More... | |
| virtual bool | hasStoppedCharging ()=0 |
| Similar to isCharging() but called when undocking. | |
| virtual bool | isCharger () |
| Gets if this is a charging-typed dock. | |
| std::string | getName () |
Protected Attributes | |
| std::string | name_ |
Detailed Description
Abstract interface for a charging dock for the docking framework.
Definition at line 34 of file charging_dock.hpp.
Member Function Documentation
◆ configure()
|
pure virtual |
- Parameters
-
parent pointer to user's node name The name of this planner tf A pointer to a TF buffer
Implemented in opennav_docking_core::NonChargingDock, opennav_docking::SimpleNonChargingDock, and opennav_docking::SimpleChargingDock.
◆ disableCharging()
|
pure virtual |
Undocking while current is still flowing can damage a charge dock so some charge docks provide the ability to disable charging before the robot physically disconnects. The undocking action will not command the robot to move until this returns true.
NOTE: this function is expected to return QUICKLY. Blocking here will block the docking controller loop.
Implemented in opennav_docking_core::NonChargingDock, and opennav_docking::SimpleChargingDock.
◆ getRefinedPose()
|
pure virtual |
Method to obtain the refined pose of the dock, usually based on sensors.
- Parameters
-
pose The initial estimate of the dock pose. frame The frame of the initial estimate.
Implemented in opennav_docking_core::NonChargingDock, opennav_docking::SimpleNonChargingDock, and opennav_docking::SimpleChargingDock.
◆ getStagingPose()
|
pure virtual |
Method to obtain the dock's staging pose. This method should likely be using TF and the dock's pose information to find the staging pose from a static or parameterized staging pose relative to the docking pose.
- Returns
- PoseStamped of staging pose in the specified frame
Implemented in opennav_docking_core::NonChargingDock, opennav_docking::SimpleNonChargingDock, and opennav_docking::SimpleChargingDock.
◆ isCharging()
|
pure virtual |
Are we charging? If a charge dock requires any sort of negotiation to begin charging, that should happen inside this function as this function will be called repeatedly after the docking loop to check if successful.
NOTE: this function is expected to return QUICKLY. Blocking here will block the docking controller loop.
Implemented in opennav_docking_core::NonChargingDock, and opennav_docking::SimpleChargingDock.
◆ isDocked()
|
pure virtual |
Have we made contact with dock? This can be implemented in a variety of ways: by establishing communications with the dock, by monitoring the the drive motor efforts, etc.
NOTE: this function is expected to return QUICKLY. Blocking here will block the docking controller loop.
Implemented in opennav_docking_core::NonChargingDock, opennav_docking::SimpleNonChargingDock, and opennav_docking::SimpleChargingDock.
The documentation for this class was generated from the following file:
- nav2_docking/opennav_docking_core/include/opennav_docking_core/charging_dock.hpp