Using a costmap via a ros topic, this object is used to find if robot poses are in collision with the costmap environment. More...
#include <nav2_costmap_2d/include/nav2_costmap_2d/costmap_topic_collision_checker.hpp>
Public Member Functions | |
| CostmapTopicCollisionChecker (CostmapSubscriber &costmap_sub, FootprintSubscriber &footprint_sub, std::string name="collision_checker") | |
| A constructor. | |
| CostmapTopicCollisionChecker (CostmapSubscriber &costmap_sub, std::string footprint_string, std::string name="collision_checker") | |
| Alternative constructor with a footprint string instead of a subscriber. It needs to be defined relative to the robot frame. | |
| ~CostmapTopicCollisionChecker ()=default | |
| A destructor. | |
| double | scorePose (const geometry_msgs::msg::Pose2D &pose, bool fetch_costmap_and_footprint=true) |
| Returns the obstacle footprint score for a particular pose. More... | |
| bool | isCollisionFree (const geometry_msgs::msg::Pose2D &pose, bool fetch_costmap_and_footprint=true) |
| Returns if a pose is collision free. More... | |
Protected Member Functions | |
| Footprint | getFootprint (const geometry_msgs::msg::Pose2D &pose, bool fetch_latest_footprint=true) |
| Get a footprint at a set pose. More... | |
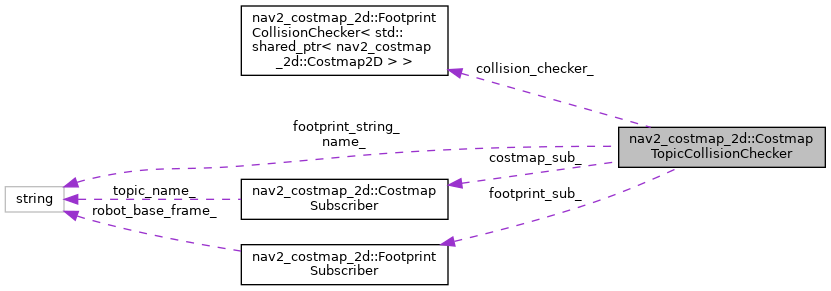
Protected Attributes | |
| std::string | name_ |
| CostmapSubscriber & | costmap_sub_ |
| FootprintSubscriber * | footprint_sub_ = nullptr |
| FootprintCollisionChecker< std::shared_ptr< Costmap2D > > | collision_checker_ |
| rclcpp::Clock::SharedPtr | clock_ |
| Footprint | footprint_ |
| std::string | footprint_string_ |
Detailed Description
Using a costmap via a ros topic, this object is used to find if robot poses are in collision with the costmap environment.
Definition at line 40 of file costmap_topic_collision_checker.hpp.
Member Function Documentation
◆ getFootprint()
|
protected |
Get a footprint at a set pose.
- Parameters
-
pose Pose to get footprint at fetch_latest_footprint Defaults to true. When checking with multiple poses at once, footprint should be fetched in the first check but fetching can be skipped in consequent checks for speedup
Definition at line 100 of file costmap_topic_collision_checker.cpp.
References nav2_costmap_2d::FootprintSubscriber::getFootprintInRobotFrame(), and nav2_costmap_2d::transformFootprint().
Referenced by scorePose().


◆ isCollisionFree()
| bool nav2_costmap_2d::CostmapTopicCollisionChecker::isCollisionFree | ( | const geometry_msgs::msg::Pose2D & | pose, |
| bool | fetch_costmap_and_footprint = true |
||
| ) |
Returns if a pose is collision free.
- Parameters
-
pose Pose to check collision at fetch_costmap_and_footprint Defaults to true. When checking with multiple poses at once, data should be fetched in the first check but fetching can be skipped in consequent checks for speedup
Definition at line 58 of file costmap_topic_collision_checker.cpp.
References scorePose().

◆ scorePose()
| double nav2_costmap_2d::CostmapTopicCollisionChecker::scorePose | ( | const geometry_msgs::msg::Pose2D & | pose, |
| bool | fetch_costmap_and_footprint = true |
||
| ) |
Returns the obstacle footprint score for a particular pose.
- Parameters
-
pose Pose to get score at fetch_costmap_and_footprint Defaults to true. When checking with multiple poses at once, data should be fetched in the first check but fetching can be skipped in consequent checks for speedup
Definition at line 79 of file costmap_topic_collision_checker.cpp.
References nav2_costmap_2d::CostmapSubscriber::getCostmap(), and getFootprint().
Referenced by isCollisionFree().


The documentation for this class was generated from the following files:
- nav2_costmap_2d/include/nav2_costmap_2d/costmap_topic_collision_checker.hpp
- nav2_costmap_2d/src/costmap_topic_collision_checker.cpp