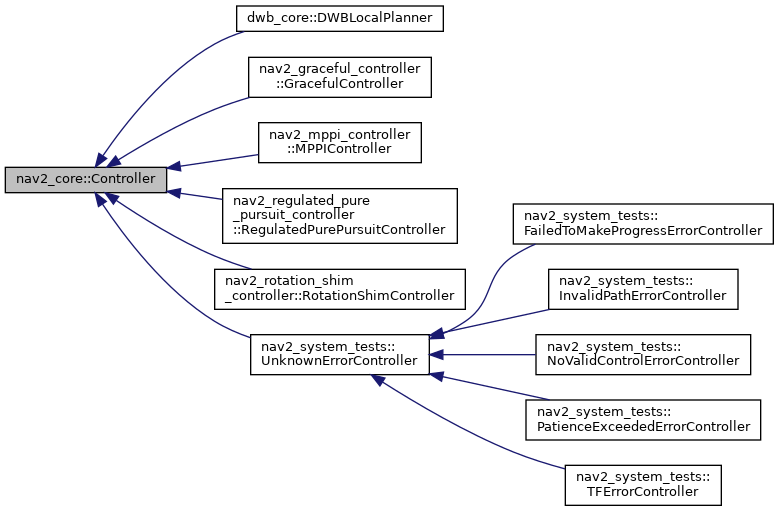
controller interface that acts as a virtual base class for all controller plugins More...
#include <nav2_core/include/nav2_core/controller.hpp>
Public Types | |
| using | Ptr = std::shared_ptr< nav2_core::Controller > |
Public Member Functions | |
| virtual | ~Controller () |
| Virtual destructor. | |
| virtual void | configure (const rclcpp_lifecycle::LifecycleNode::WeakPtr &, std::string name, std::shared_ptr< tf2_ros::Buffer >, std::shared_ptr< nav2_costmap_2d::Costmap2DROS >)=0 |
| virtual void | cleanup ()=0 |
| Method to cleanup resources. | |
| virtual void | activate ()=0 |
| Method to active planner and any threads involved in execution. | |
| virtual void | deactivate ()=0 |
| Method to deactive planner and any threads involved in execution. | |
| virtual void | setPlan (const nav_msgs::msg::Path &path)=0 |
| local setPlan - Sets the global plan More... | |
| virtual geometry_msgs::msg::TwistStamped | computeVelocityCommands (const geometry_msgs::msg::PoseStamped &pose, const geometry_msgs::msg::Twist &velocity, nav2_core::GoalChecker *goal_checker)=0 |
| Controller computeVelocityCommands - calculates the best command given the current pose and velocity. More... | |
| virtual bool | cancel () |
| Cancel the current control action. More... | |
| virtual void | setSpeedLimit (const double &speed_limit, const bool &percentage)=0 |
| Limits the maximum linear speed of the robot. More... | |
| virtual void | reset () |
| Reset the state of the controller if necessary after task is exited. | |
Detailed Description
controller interface that acts as a virtual base class for all controller plugins
Definition at line 60 of file controller.hpp.
Member Function Documentation
◆ cancel()
|
inlinevirtual |
Cancel the current control action.
- Returns
- True if the cancellation was successful. If false is returned, computeVelocityCommands will be called until cancel returns true.
Reimplemented in nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController.
Definition at line 124 of file controller.hpp.
◆ computeVelocityCommands()
|
pure virtual |
Controller computeVelocityCommands - calculates the best command given the current pose and velocity.
It is presumed that the global plan is already set.
This is mostly a wrapper for the protected computeVelocityCommands function which has additional debugging info.
- Parameters
-
pose Current robot pose velocity Current robot velocity goal_checker Pointer to the current goal checker the task is utilizing
- Returns
- The best command for the robot to drive
Implemented in nav2_mppi_controller::MPPIController, nav2_graceful_controller::GracefulController, nav2_rotation_shim_controller::RotationShimController, nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController, dwb_core::DWBLocalPlanner, and nav2_system_tests::UnknownErrorController.
◆ configure()
|
pure virtual |
- Parameters
-
parent pointer to user's node costmap_ros A pointer to the costmap
Implemented in nav2_rotation_shim_controller::RotationShimController, nav2_graceful_controller::GracefulController, dwb_core::DWBLocalPlanner, nav2_mppi_controller::MPPIController, and nav2_system_tests::UnknownErrorController.
◆ setPlan()
|
pure virtual |
local setPlan - Sets the global plan
- Parameters
-
path The global plan
Implemented in nav2_rotation_shim_controller::RotationShimController, nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController, nav2_mppi_controller::MPPIController, nav2_graceful_controller::GracefulController, dwb_core::DWBLocalPlanner, and nav2_system_tests::UnknownErrorController.
◆ setSpeedLimit()
|
pure virtual |
Limits the maximum linear speed of the robot.
- Parameters
-
speed_limit expressed in absolute value (in m/s) or in percentage from maximum robot speed. percentage Setting speed limit in percentage if true or in absolute values in false case.
Implemented in nav2_rotation_shim_controller::RotationShimController, nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController, nav2_mppi_controller::MPPIController, nav2_graceful_controller::GracefulController, dwb_core::DWBLocalPlanner, and nav2_system_tests::UnknownErrorController.
The documentation for this class was generated from the following file:
- nav2_core/include/nav2_core/controller.hpp