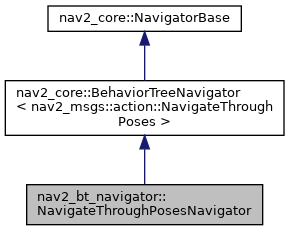
A navigator for navigating to a a bunch of intermediary poses. More...
#include <nav2_bt_navigator/include/nav2_bt_navigator/navigators/navigate_through_poses.hpp>

Public Types | |
| using | ActionT = nav2_msgs::action::NavigateThroughPoses |
| typedef std::vector< geometry_msgs::msg::PoseStamped > | Goals |
 Public Types inherited from nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses > Public Types inherited from nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses > | |
| using | Ptr = std::shared_ptr< nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses > > |
Public Member Functions | |
| NavigateThroughPosesNavigator () | |
| A constructor for NavigateThroughPosesNavigator. | |
| bool | configure (rclcpp_lifecycle::LifecycleNode::WeakPtr node, std::shared_ptr< nav2_util::OdomSmoother > odom_smoother) override |
| A configure state transition to configure navigator's state. More... | |
| std::string | getName () override |
| Get action name for this navigator. More... | |
| std::string | getDefaultBTFilepath (rclcpp_lifecycle::LifecycleNode::WeakPtr node) override |
| Get navigator's default BT. More... | |
| Public Member Functions inherited from nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses > | |
| BehaviorTreeNavigator () | |
| A Navigator constructor. | |
| virtual | ~BehaviorTreeNavigator ()=default |
| Virtual destructor. | |
| bool | on_configure (rclcpp_lifecycle::LifecycleNode::WeakPtr parent_node, const std::vector< std::string > &plugin_lib_names, const FeedbackUtils &feedback_utils, nav2_core::NavigatorMuxer *plugin_muxer, std::shared_ptr< nav2_util::OdomSmoother > odom_smoother) final |
| Configuration to setup the navigator's backend BT and actions. More... | |
| bool | on_activate () final |
| Activation of the navigator's backend BT and actions. More... | |
| bool | on_deactivate () final |
| Deactivation of the navigator's backend BT and actions. More... | |
| bool | on_cleanup () final |
| Cleanup a navigator. More... | |
Protected Member Functions | |
| bool | goalReceived (ActionT::Goal::ConstSharedPtr goal) override |
| A callback to be called when a new goal is received by the BT action server Can be used to check if goal is valid and put values on the blackboard which depend on the received goal. More... | |
| void | onLoop () override |
| A callback that defines execution that happens on one iteration through the BT Can be used to publish action feedback. | |
| void | onPreempt (ActionT::Goal::ConstSharedPtr goal) override |
| A callback that is called when a preempt is requested. | |
| void | goalCompleted (typename ActionT::Result::SharedPtr result, const nav2_behavior_tree::BtStatus final_bt_status) override |
| A callback that is called when a the action is completed, can fill in action result message or indicate that this action is done. More... | |
| bool | initializeGoalPoses (ActionT::Goal::ConstSharedPtr goal) |
| Goal pose initialization on the blackboard. More... | |
| Protected Member Functions inherited from nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses > | |
| bool | onGoalReceived (typename ActionT::Goal::ConstSharedPtr goal) |
| An intermediate goal reception function to mux navigators. | |
| void | onCompletion (typename ActionT::Result::SharedPtr result, const nav2_behavior_tree::BtStatus final_bt_status) |
| An intermediate completion function to mux navigators. | |
| virtual bool | cleanup () |
| Method to cleanup resources. | |
| virtual bool | activate () |
| Method to activate any threads involved in execution. | |
| virtual bool | deactivate () |
| Method to deactivate and any threads involved in execution. | |
Protected Attributes | |
| rclcpp::Time | start_time_ |
| std::string | goals_blackboard_id_ |
| std::string | path_blackboard_id_ |
| std::shared_ptr< nav2_util::OdomSmoother > | odom_smoother_ |
| Protected Attributes inherited from nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses > | |
| std::unique_ptr< nav2_behavior_tree::BtActionServer< nav2_msgs::action::NavigateThroughPoses > > | bt_action_server_ |
| rclcpp::Logger | logger_ |
| rclcpp::Clock::SharedPtr | clock_ |
| FeedbackUtils | feedback_utils_ |
| NavigatorMuxer * | plugin_muxer_ |
Detailed Description
A navigator for navigating to a a bunch of intermediary poses.
Definition at line 38 of file navigate_through_poses.hpp.
Member Function Documentation
◆ configure()
|
overridevirtual |
A configure state transition to configure navigator's state.
- Parameters
-
node Weakptr to the lifecycle node odom_smoother Object to get current smoothed robot's speed
Reimplemented from nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >.
Definition at line 26 of file navigate_through_poses.cpp.
◆ getDefaultBTFilepath()
|
overridevirtual |
Get navigator's default BT.
- Parameters
-
node WeakPtr to the lifecycle node
- Returns
- string Filepath to default XML
Implements nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >.
Definition at line 52 of file navigate_through_poses.cpp.
◆ getName()
|
inlineoverridevirtual |
Get action name for this navigator.
- Returns
- string Name of action server
Implements nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >.
Definition at line 64 of file navigate_through_poses.hpp.
◆ goalCompleted()
|
overrideprotectedvirtual |
A callback that is called when a the action is completed, can fill in action result message or indicate that this action is done.
- Parameters
-
result Action template result message to populate final_bt_status Resulting status of the behavior tree execution that may be referenced while populating the result.
Implements nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >.
Definition at line 88 of file navigate_through_poses.cpp.
◆ goalReceived()
|
overrideprotectedvirtual |
A callback to be called when a new goal is received by the BT action server Can be used to check if goal is valid and put values on the blackboard which depend on the received goal.
- Parameters
-
goal Action template's goal message
- Returns
- bool if goal was received successfully to be processed
Implements nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >.
Definition at line 73 of file navigate_through_poses.cpp.
References initializeGoalPoses().

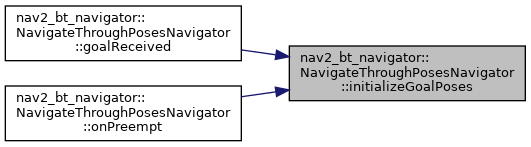
◆ initializeGoalPoses()
|
protected |
Goal pose initialization on the blackboard.
- Returns
- bool if goal was initialized successfully to be processed
Definition at line 213 of file navigate_through_poses.cpp.
Referenced by goalReceived(), and onPreempt().
The documentation for this class was generated from the following files:
- nav2_bt_navigator/include/nav2_bt_navigator/navigators/navigate_through_poses.hpp
- nav2_bt_navigator/src/navigators/navigate_through_poses.cpp