Public Member Functions | |
| def | __init__ (self, node_name='basic_navigator', namespace='') |
| def | destroyNode (self) |
| def | destroy_node (self) |
| def | setInitialPose (self, initial_pose) |
| def | goThroughPoses (self, poses, behavior_tree='') |
| def | goToPose (self, pose, behavior_tree='') |
| def | followWaypoints (self, poses) |
| def | spin (self, spin_dist=1.57, time_allowance=10) |
| def | backup (self, backup_dist=0.15, backup_speed=0.025, time_allowance=10) |
| def | assistedTeleop (self, time_allowance=30) |
| def | followPath (self, path, controller_id='', goal_checker_id='') |
| def | cancelTask (self) |
| def | isTaskComplete (self) |
| def | getFeedback (self) |
| def | getResult (self) |
| def | waitUntilNav2Active (self, navigator='bt_navigator', localizer='amcl') |
| def | getPath (self, start, goal, planner_id='', use_start=False) |
| def | getPathThroughPoses (self, start, goals, planner_id='', use_start=False) |
| def | smoothPath (self, path, smoother_id='', max_duration=2.0, check_for_collision=False) |
| def | changeMap (self, map_filepath) |
| def | clearAllCostmaps (self) |
| def | clearLocalCostmap (self) |
| def | clearGlobalCostmap (self) |
| def | getGlobalCostmap (self) |
| def | getLocalCostmap (self) |
| def | lifecycleStartup (self) |
| def | lifecycleShutdown (self) |
| def | info (self, msg) |
| def | warn (self, msg) |
| def | error (self, msg) |
| def | debug (self, msg) |
Detailed Description
Definition at line 47 of file robot_navigator.py.
Member Function Documentation
◆ cancelTask()
| def nav2_simple_commander.robot_navigator.BasicNavigator.cancelTask | ( | self | ) |
Cancel pending task request of any type.
Definition at line 270 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, tester.WaypointFollowerTest.goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.result_future.

◆ changeMap()
| def nav2_simple_commander.robot_navigator.BasicNavigator.changeMap | ( | self, | |
| map_filepath | |||
| ) |
Change the current static map in the map server.
Definition at line 435 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.change_maps_srv, nav2_simple_commander.robot_navigator.BasicNavigator.error(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
◆ clearAllCostmaps()
| def nav2_simple_commander.robot_navigator.BasicNavigator.clearAllCostmaps | ( | self | ) |
Clear all costmaps.
Definition at line 450 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.clearGlobalCostmap(), and nav2_simple_commander.robot_navigator.BasicNavigator.clearLocalCostmap().

◆ clearGlobalCostmap()
| def nav2_simple_commander.robot_navigator.BasicNavigator.clearGlobalCostmap | ( | self | ) |
Clear global costmap.
Definition at line 465 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.clear_costmap_global_srv, and nav2_simple_commander.robot_navigator.BasicNavigator.info().
Referenced by nav2_simple_commander.robot_navigator.BasicNavigator.clearAllCostmaps().


◆ clearLocalCostmap()
| def nav2_simple_commander.robot_navigator.BasicNavigator.clearLocalCostmap | ( | self | ) |
Clear local costmap.
Definition at line 456 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.clear_costmap_local_srv, and nav2_simple_commander.robot_navigator.BasicNavigator.info().
Referenced by nav2_simple_commander.robot_navigator.BasicNavigator.clearAllCostmaps().


◆ followPath()
| def nav2_simple_commander.robot_navigator.BasicNavigator.followPath | ( | self, | |
| path, | |||
controller_id = '', |
|||
goal_checker_id = '' |
|||
| ) |
Send a `FollowPath` action request.
Definition at line 246 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_constrained_smoother::OptimizerParams.debug, nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.follow_path_client, nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, tester.WaypointFollowerTest.goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.result_future.
◆ followWaypoints()
| def nav2_simple_commander.robot_navigator.BasicNavigator.followWaypoints | ( | self, | |
| poses | |||
| ) |
Send a `FollowWaypoints` action request.
Definition at line 163 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.assisted_teleop_client, nav2_simple_commander.robot_navigator.BasicNavigator.backup_client, nav2_constrained_smoother::OptimizerParams.debug, nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.follow_waypoints_client, nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, tester.WaypointFollowerTest.goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.spin_client.
◆ getFeedback()
| def nav2_simple_commander.robot_navigator.BasicNavigator.getFeedback | ( | self | ) |
Get the pending action feedback message.
Definition at line 296 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.feedback.
◆ getGlobalCostmap()
| def nav2_simple_commander.robot_navigator.BasicNavigator.getGlobalCostmap | ( | self | ) |
Get the global costmap.
Definition at line 474 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.get_costmap_global_srv, and nav2_simple_commander.robot_navigator.BasicNavigator.info().

◆ getLocalCostmap()
| def nav2_simple_commander.robot_navigator.BasicNavigator.getLocalCostmap | ( | self | ) |
Get the local costmap.
Definition at line 483 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.get_costmap_local_srv, and nav2_simple_commander.robot_navigator.BasicNavigator.info().

◆ getPath()
| def nav2_simple_commander.robot_navigator.BasicNavigator.getPath | ( | self, | |
| start, | |||
| goal, | |||
planner_id = '', |
|||
use_start = False |
|||
| ) |
Send a `ComputePathToPose` action request.
Definition at line 354 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._getPathImpl().

◆ getPathThroughPoses()
| def nav2_simple_commander.robot_navigator.BasicNavigator.getPathThroughPoses | ( | self, | |
| start, | |||
| goals, | |||
planner_id = '', |
|||
use_start = False |
|||
| ) |
Send a `ComputePathThroughPoses` action request.
Definition at line 362 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.compute_path_through_poses_client, nav2_constrained_smoother::OptimizerParams.debug, nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, tester.WaypointFollowerTest.goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, nav2_simple_commander.robot_navigator.BasicNavigator.smoother_client, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, and nav2_simple_commander.robot_navigator.BasicNavigator.warn().
◆ getResult()
| def nav2_simple_commander.robot_navigator.BasicNavigator.getResult | ( | self | ) |
Get the pending action result message.
Definition at line 300 of file robot_navigator.py.
References Cell.status, and nav2_simple_commander.robot_navigator.BasicNavigator.status.
◆ goThroughPoses()
| def nav2_simple_commander.robot_navigator.BasicNavigator.goThroughPoses | ( | self, | |
| poses, | |||
behavior_tree = '' |
|||
| ) |
Send a `NavThroughPoses` action request.
Definition at line 115 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_constrained_smoother::OptimizerParams.debug, nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, tester.WaypointFollowerTest.goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.nav_through_poses_client, and nav2_simple_commander.robot_navigator.BasicNavigator.result_future.
◆ goToPose()
| def nav2_simple_commander.robot_navigator.BasicNavigator.goToPose | ( | self, | |
| pose, | |||
behavior_tree = '' |
|||
| ) |
Send a `NavToPose` action request.
Definition at line 138 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_constrained_smoother::OptimizerParams.debug, nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, tester.WaypointFollowerTest.goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.nav_to_pose_client, and nav2_simple_commander.robot_navigator.BasicNavigator.result_future.
◆ isTaskComplete()
| def nav2_simple_commander.robot_navigator.BasicNavigator.isTaskComplete | ( | self | ) |
Check if the task request of any type is complete yet.
Definition at line 278 of file robot_navigator.py.
References nav2_constrained_smoother::OptimizerParams.debug, nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, Cell.status, and nav2_simple_commander.robot_navigator.BasicNavigator.status.

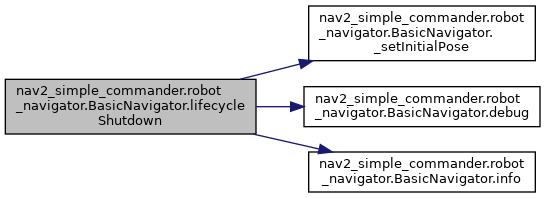
◆ lifecycleShutdown()
| def nav2_simple_commander.robot_navigator.BasicNavigator.lifecycleShutdown | ( | self | ) |
Shutdown nav2 lifecycle system.
Definition at line 516 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._setInitialPose(), nav2_constrained_smoother::OptimizerParams.debug, nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.feedback, nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose, tester_node.NavTester.initial_pose, nav_through_poses_tester_node.NavTester.initial_pose, nav_to_pose_tester_node.NavTester.initial_pose, nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose_pub, tester_node.NavTester.initial_pose_pub, nav_through_poses_tester_node.NavTester.initial_pose_pub, nav_to_pose_tester_node.NavTester.initial_pose_pub, tester.WaypointFollowerTest.initial_pose_pub, nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose_received, tester_node.NavTester.initial_pose_received, nav_through_poses_tester_node.NavTester.initial_pose_received, nav_to_pose_tester_node.NavTester.initial_pose_received, and tester.WaypointFollowerTest.initial_pose_received.
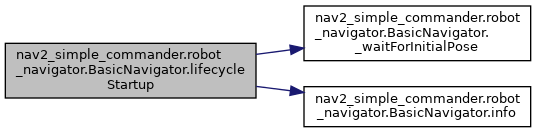
◆ lifecycleStartup()
| def nav2_simple_commander.robot_navigator.BasicNavigator.lifecycleStartup | ( | self | ) |
Startup nav2 lifecycle system.
Definition at line 492 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._waitForInitialPose(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
◆ setInitialPose()
| def nav2_simple_commander.robot_navigator.BasicNavigator.setInitialPose | ( | self, | |
| initial_pose | |||
| ) |
Set the initial pose to the localization system.
Definition at line 109 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._setInitialPose(), nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose, tester_node.NavTester.initial_pose, nav_through_poses_tester_node.NavTester.initial_pose, nav_to_pose_tester_node.NavTester.initial_pose, nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose_received, tester_node.NavTester.initial_pose_received, nav_through_poses_tester_node.NavTester.initial_pose_received, nav_to_pose_tester_node.NavTester.initial_pose_received, and tester.WaypointFollowerTest.initial_pose_received.

◆ smoothPath()
| def nav2_simple_commander.robot_navigator.BasicNavigator.smoothPath | ( | self, | |
| path, | |||
smoother_id = '', |
|||
max_duration = 2.0, |
|||
check_for_collision = False |
|||
| ) |
Send a `SmoothPath` action request.
Definition at line 426 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._smoothPathImpl().

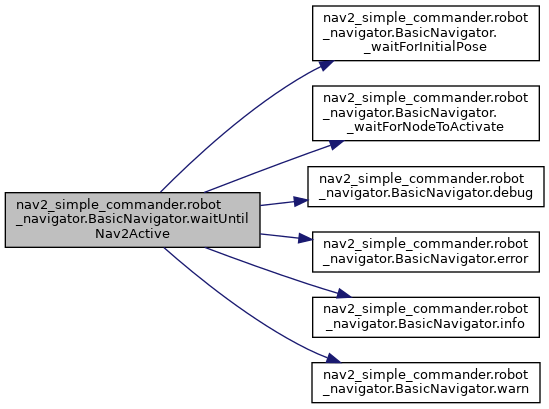
◆ waitUntilNav2Active()
| def nav2_simple_commander.robot_navigator.BasicNavigator.waitUntilNav2Active | ( | self, | |
navigator = 'bt_navigator', |
|||
localizer = 'amcl' |
|||
| ) |
Block until the full navigation system is up and running.
Definition at line 311 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._waitForInitialPose(), nav2_simple_commander.robot_navigator.BasicNavigator._waitForNodeToActivate(), nav2_simple_commander.robot_navigator.BasicNavigator.compute_path_to_pose_client, nav2_constrained_smoother::OptimizerParams.debug, nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, tester.WaypointFollowerTest.goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, and nav2_simple_commander.robot_navigator.BasicNavigator.warn().
The documentation for this class was generated from the following file:
- nav2_simple_commander/nav2_simple_commander/robot_navigator.py