A plugin interface to perform an operation while tracking the route such as triggered from the graph file when a particular node is achieved, edge is entered or exited. The API also supports triggering arbitrary operations when a status has changed (e.g. any node is achieved) or at a regular frequency on query set at a fixed rate of tracker_update_rate. Operations can request the system to reroute and avoid certain edges. Example operations may be to: reroute when blocked or at a required rate (though may want to use BTs instead), adjust speed limits, wait, call an external service or action to perform a task such as calling an elevator or opening an automatic door, etc. Operations may throw nav2_core::OperationFailed exceptions in failure cases. More...
#include <nav2_route/include/nav2_route/interfaces/route_operation.hpp>
Public Types | |
| using | Ptr = std::shared_ptr< nav2_route::RouteOperation > |
Public Member Functions | |
| RouteOperation ()=default | |
| Constructor. | |
| virtual | ~RouteOperation ()=default |
| Destructor. | |
| virtual void | configure (const rclcpp_lifecycle::LifecycleNode::SharedPtr node, std::shared_ptr< nav2_costmap_2d::CostmapSubscriber > costmap_subscriber, const std::string &name)=0 |
| Configure the operation plugin (get params, create interfaces, etc) More... | |
| virtual std::string | getName ()=0 |
| An API to get the name of a particular operation for triggering, query or logging. More... | |
| virtual RouteOperationType | processType () |
| Indication of which type of route operation this plugin is. Whether it is be called by the graph's nodes or edges, whether it should be triggered at any status change, or whether it should be called constantly on any query. By default, it will create operations that are only called when a graph's node or edge requests it. Note that On Query, On Status Change, and On Graph are mutually exclusive since each operation type is merely a subset of the previous level's specificity. More... | |
| virtual OperationResult | perform (NodePtr node_achieved, EdgePtr edge_entered, EdgePtr edge_exited, const Route &route, const geometry_msgs::msg::PoseStamped &curr_pose, const Metadata *mdata=nullptr)=0 |
| The main route operation API to perform an operation when triggered. The return value indicates if the route operation is requesting rerouting when returning true. Could be if this operation is checking if a route is in collision or operation failed (to open a door, for example) and thus this current route is now invalid. More... | |
Detailed Description
A plugin interface to perform an operation while tracking the route such as triggered from the graph file when a particular node is achieved, edge is entered or exited. The API also supports triggering arbitrary operations when a status has changed (e.g. any node is achieved) or at a regular frequency on query set at a fixed rate of tracker_update_rate. Operations can request the system to reroute and avoid certain edges. Example operations may be to: reroute when blocked or at a required rate (though may want to use BTs instead), adjust speed limits, wait, call an external service or action to perform a task such as calling an elevator or opening an automatic door, etc. Operations may throw nav2_core::OperationFailed exceptions in failure cases.
Definition at line 65 of file route_operation.hpp.
Member Function Documentation
◆ configure()
|
pure virtual |
Configure the operation plugin (get params, create interfaces, etc)
- Parameters
-
node A node to use name the plugin's name set by the param file that may need to be used to correlate an operation instance to the navigation graph operation calls
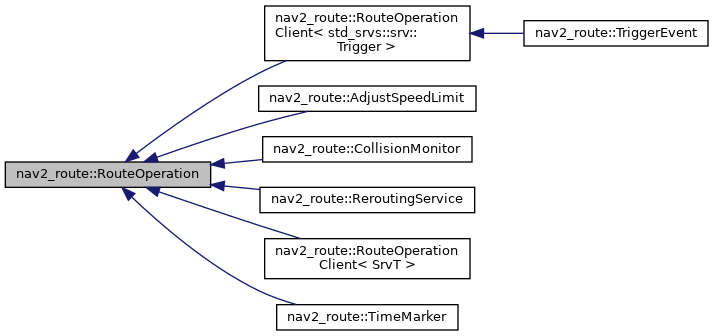
Implemented in nav2_route::RouteOperationClient< SrvT >, nav2_route::RouteOperationClient< std_srvs::srv::Trigger >, nav2_route::TimeMarker, nav2_route::ReroutingService, nav2_route::CollisionMonitor, and nav2_route::AdjustSpeedLimit.
◆ getName()
|
pure virtual |
An API to get the name of a particular operation for triggering, query or logging.
- Returns
- the plugin's name
Implemented in nav2_route::TimeMarker, nav2_route::ReroutingService, nav2_route::CollisionMonitor, nav2_route::AdjustSpeedLimit, nav2_route::RouteOperationClient< SrvT >, and nav2_route::RouteOperationClient< std_srvs::srv::Trigger >.
◆ perform()
|
pure virtual |
The main route operation API to perform an operation when triggered. The return value indicates if the route operation is requesting rerouting when returning true. Could be if this operation is checking if a route is in collision or operation failed (to open a door, for example) and thus this current route is now invalid.
- Parameters
-
mdata Metadata corresponding to the operation in the navigation graph. If metadata is invalid or irrelevant, a nullptr is given node_achieved Node achieved, for additional context (must check nullptr if at goal) edge_entered Edge entered by node achievement, for additional context (must check if nullptr if no future edge, at goal) edge_exited Edge exited by node achievement, for additional context (must check if nullptr if no last edge, starting) route Current route being tracked in full, for additional context curr_pose Current robot pose in the route frame, for additional context
- Returns
- Whether to perform rerouting and report blocked edges in that case
Implemented in nav2_route::CollisionMonitor, nav2_route::RouteOperationClient< SrvT >, nav2_route::RouteOperationClient< std_srvs::srv::Trigger >, nav2_route::TimeMarker, nav2_route::AdjustSpeedLimit, and nav2_route::ReroutingService.
◆ processType()
|
inlinevirtual |
Indication of which type of route operation this plugin is. Whether it is be called by the graph's nodes or edges, whether it should be triggered at any status change, or whether it should be called constantly on any query. By default, it will create operations that are only called when a graph's node or edge requests it. Note that On Query, On Status Change, and On Graph are mutually exclusive since each operation type is merely a subset of the previous level's specificity.
- Returns
- The type of operation (on graph call, on status changes, or constantly)
Reimplemented in nav2_route::TimeMarker, nav2_route::ReroutingService, nav2_route::CollisionMonitor, nav2_route::AdjustSpeedLimit, nav2_route::RouteOperationClient< SrvT >, and nav2_route::RouteOperationClient< std_srvs::srv::Trigger >.
Definition at line 107 of file route_operation.hpp.
The documentation for this class was generated from the following file:
- nav2_route/include/nav2_route/interfaces/route_operation.hpp