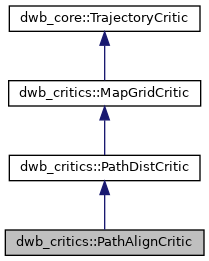
Scores trajectories based on how far from the global path the front of the robot ends up. More...
#include <nav2_dwb_controller/dwb_critics/include/dwb_critics/path_align.hpp>
Public Member Functions | |
| void | onInit () override |
| bool | prepare (const geometry_msgs::msg::Pose2D &pose, const nav_2d_msgs::msg::Twist2D &vel, const geometry_msgs::msg::Pose2D &goal, const nav_2d_msgs::msg::Path2D &global_plan) override |
| Prior to evaluating any trajectories, look at contextual information constant across all trajectories. More... | |
| double | getScale () const override |
| double | scorePose (const geometry_msgs::msg::Pose2D &pose) override |
| Retrieve the score for a single pose. More... | |
 Public Member Functions inherited from dwb_critics::PathDistCritic Public Member Functions inherited from dwb_critics::PathDistCritic | |
| bool | prepare (const geometry_msgs::msg::Pose2D &pose, const nav_2d_msgs::msg::Twist2D &vel, const geometry_msgs::msg::Pose2D &goal, const nav_2d_msgs::msg::Path2D &global_plan) override |
| Prior to evaluating any trajectories, look at contextual information constant across all trajectories. More... | |
| Public Member Functions inherited from dwb_critics::MapGridCritic | |
| double | scoreTrajectory (const dwb_msgs::msg::Trajectory2D &traj) override |
| Return a raw score for the given trajectory. More... | |
| void | addCriticVisualization (std::vector< std::pair< std::string, std::vector< float >>> &cost_channels) override |
| Add information to the given pointcloud for debugging costmap-grid based scores. More... | |
| double | getScore (unsigned int x, unsigned int y) |
| Retrieve the score for a particular cell of the costmap. More... | |
| void | setAsObstacle (unsigned int index) |
| Sets the score of a particular cell to the obstacle cost. More... | |
| Public Member Functions inherited from dwb_core::TrajectoryCritic | |
| void | initialize (const nav2_util::LifecycleNode::SharedPtr &nh, const std::string &name, const std::string &ns, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros) |
| Initialize the critic with appropriate pointers and parameters. More... | |
| virtual void | debrief (const nav_2d_msgs::msg::Twist2D &) |
| debrief informs the critic what the chosen cmd_vel was (if it cares) | |
| std::string | getName () |
| void | setScale (const double scale) |
Protected Attributes | |
| bool | zero_scale_ |
| double | forward_point_distance_ |
| Protected Attributes inherited from dwb_critics::MapGridCritic | |
| std::shared_ptr< MapGridQueue > | queue_ |
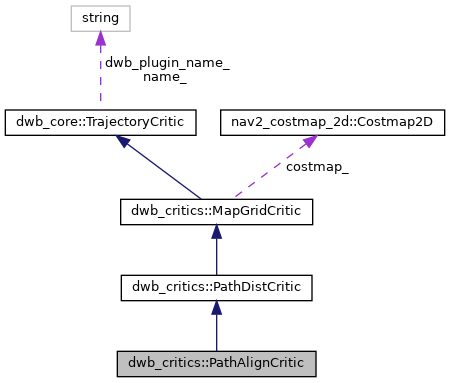
| nav2_costmap_2d::Costmap2D * | costmap_ |
| std::vector< double > | cell_values_ |
| double | obstacle_score_ |
| double | unreachable_score_ |
| Special cell_values. | |
| bool | stop_on_failure_ |
| ScoreAggregationType | aggregationType_ |
| Protected Attributes inherited from dwb_core::TrajectoryCritic | |
| std::string | name_ |
| std::string | dwb_plugin_name_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| double | scale_ |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | node_ |
Additional Inherited Members | |
| Public Types inherited from dwb_core::TrajectoryCritic | |
| using | Ptr = std::shared_ptr< dwb_core::TrajectoryCritic > |
| Protected Types inherited from dwb_critics::MapGridCritic | |
| enum class | ScoreAggregationType { Last , Sum , Product } |
| Separate modes for aggregating scores across the multiple poses in a trajectory. More... | |
| Protected Member Functions inherited from dwb_critics::MapGridCritic | |
| void | reset () override |
| Clear the queuDWB_CRITICS_MAP_GRID_He and set cell_values_ to the appropriate number of unreachableCellScore. | |
| void | propogateManhattanDistances () |
| Go through the queue and set the cells to the Manhattan distance from their parents. | |
Detailed Description
Scores trajectories based on how far from the global path the front of the robot ends up.
This uses the costmap grid as a proxy for calculating which way the robot should be facing relative to the global path. Instead of scoring how far the center of the robot is away from the global path, this critic calculates how far a point forward_point_distance in front of the robot is from the global path. This biases the planner toward trajectories that line up with the global plan.
When the robot is near the end of the path, the scale of this critic is set to zero. When the projected point is past the global goal, we no longer want this critic to try to align to a part of the global path that isn't there.
Definition at line 56 of file path_align.hpp.
Member Function Documentation
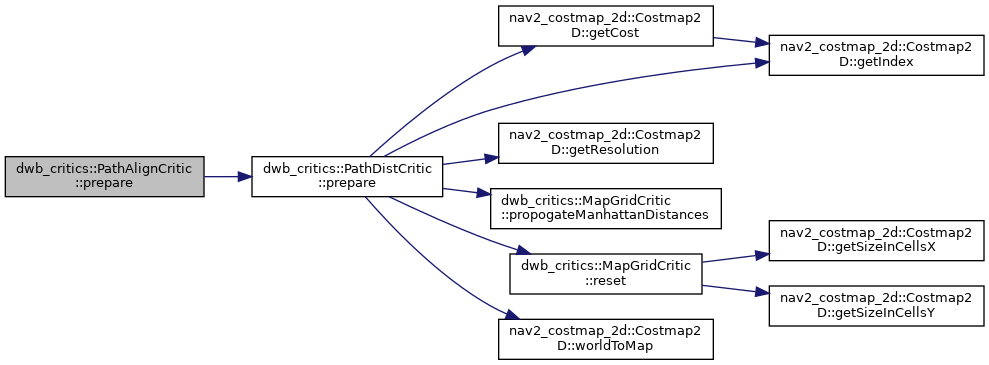
◆ prepare()
|
overridevirtual |
Prior to evaluating any trajectories, look at contextual information constant across all trajectories.
Subclasses may overwrite. Return false in case there is any error.
- Parameters
-
pose Current pose (costmap frame) vel Current velocity goal The final goal (costmap frame) global_plan Transformed global plan in costmap frame, possibly cropped to nearby points
Reimplemented from dwb_core::TrajectoryCritic.
Definition at line 60 of file path_align.cpp.
References dwb_critics::PathDistCritic::prepare().
◆ scorePose()
|
overridevirtual |
Retrieve the score for a single pose.
- Parameters
-
pose The pose to score, assumed to be in the same frame as the costmap
- Returns
- The score associated with the cell of the costmap where the pose lies
Reimplemented from dwb_critics::MapGridCritic.
Definition at line 88 of file path_align.cpp.
References dwb_critics::MapGridCritic::scorePose().

The documentation for this class was generated from the following files:
- nav2_dwb_controller/dwb_critics/include/dwb_critics/path_align.hpp
- nav2_dwb_controller/dwb_critics/src/path_align.cpp