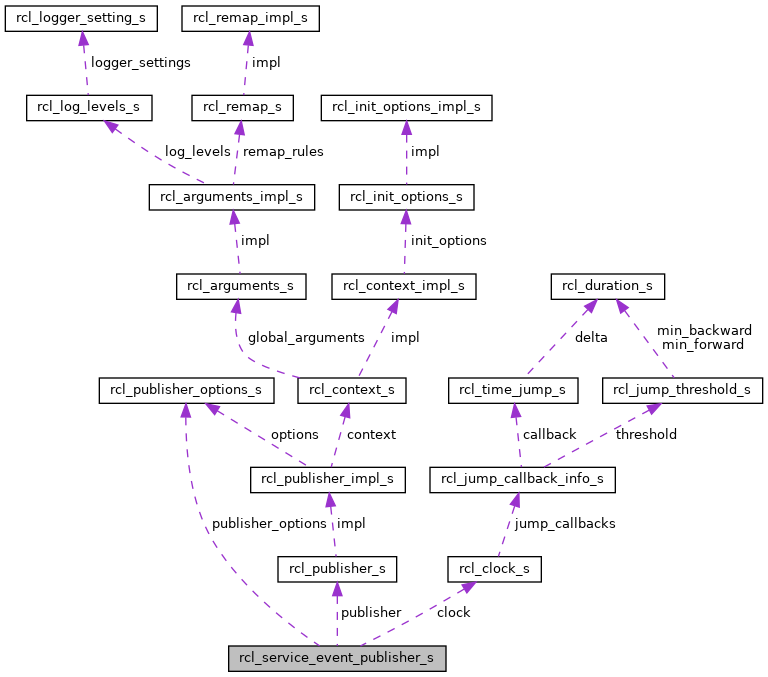
Collaboration diagram for rcl_service_event_publisher_s:
Public Attributes | |
| rcl_publisher_t * | publisher |
| Handle to publisher for publishing service events. | |
| char * | service_event_topic_name |
| Name of service introspection topic: <service_name>/<RCL_SERVICE_INTROSPECTION_TOPIC_POSTFIX> | |
| rcl_service_introspection_state_t | introspection_state |
| Current state of introspection; off, metadata, or contents. | |
| rcl_clock_t * | clock |
| Handle to clock for timestamping service events. | |
| rcl_publisher_options_t | publisher_options |
| Publisher options for service event publisher. | |
| const rosidl_service_type_support_t * | service_type_support |
| Handle to service typesupport. | |
Detailed Description
Definition at line 33 of file service_event_publisher.h.
The documentation for this struct was generated from the following file:
- rcl/src/rcl/service_event_publisher.h