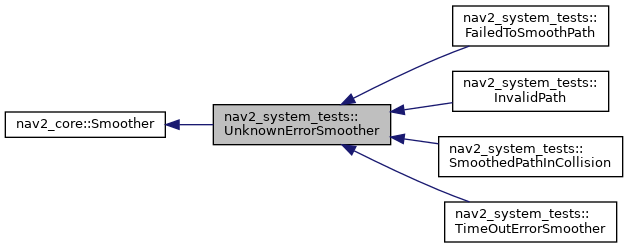
Inheritance diagram for nav2_system_tests::UnknownErrorSmoother:
Collaboration diagram for nav2_system_tests::UnknownErrorSmoother:
Public Member Functions | |
| void | configure (const nav2::LifecycleNode::WeakPtr &, std::string, std::shared_ptr< tf2_ros::Buffer >, std::shared_ptr< nav2_costmap_2d::CostmapSubscriber >, std::shared_ptr< nav2_costmap_2d::FootprintSubscriber >) override |
| void | cleanup () override |
| Method to cleanup resources. | |
| void | activate () override |
| Method to activate smoother and any threads involved in execution. | |
| void | deactivate () override |
| Method to deactivate smoother and any threads involved in execution. | |
| bool | smooth (nav_msgs::msg::Path &, const rclcpp::Duration &) override |
| Method to smooth given path. More... | |
 Public Member Functions inherited from nav2_core::Smoother Public Member Functions inherited from nav2_core::Smoother | |
| virtual | ~Smoother () |
| Virtual destructor. | |
Additional Inherited Members | |
| Public Types inherited from nav2_core::Smoother | |
| using | Ptr = std::shared_ptr< nav2_core::Smoother > |
Detailed Description
Definition at line 27 of file smoother_error_plugin.hpp.
Member Function Documentation
◆ smooth()
|
inlineoverridevirtual |
Method to smooth given path.
- Parameters
-
path In-out path to be smoothed max_time Maximum duration smoothing should take
- Returns
- If smoothing was completed (true) or interrupted by time limit (false)
Implements nav2_core::Smoother.
Definition at line 42 of file smoother_error_plugin.hpp.
The documentation for this class was generated from the following file:
- nav2_system_tests/src/error_codes/smoother/smoother_error_plugin.hpp