Public Member Functions | |
| template<typename NodeT > | |
| LifecycleManagerClient (const std::string &name, NodeT parent_node) | |
| A constructor for LifeCycleMangerClient. More... | |
| bool | startup (const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| Make start up service call. More... | |
| bool | shutdown (const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| Make shutdown service call. More... | |
| bool | pause (const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| Make pause service call. More... | |
| bool | resume (const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| Make resume service call. More... | |
| bool | reset (const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| Make reset service call. More... | |
| bool | configure (const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| Make configure service call. More... | |
| bool | cleanup (const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| Make cleanup service call. More... | |
| SystemStatus | is_active (const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| Check if lifecycle node manager server is active. More... | |
Protected Types | |
| using | ManageLifecycleNodes = nav2_msgs::srv::ManageLifecycleNodes |
Protected Member Functions | |
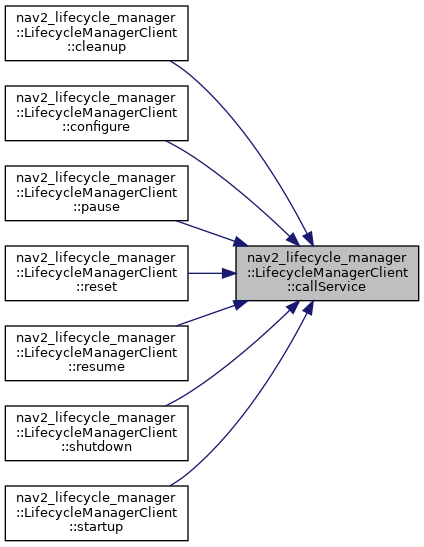
| bool | callService (uint8_t command, const std::chrono::nanoseconds timeout=std::chrono::nanoseconds(-1)) |
| A generic method used to call startup, shutdown, etc. More... | |
Protected Attributes | |
| rclcpp::Node::SharedPtr | node_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("nav2_lifecycle_manager_client")} |
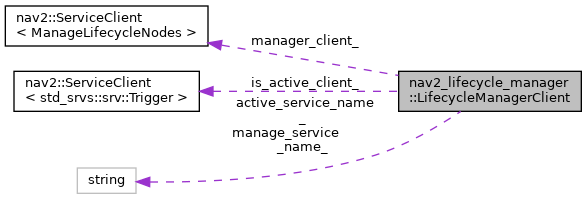
| nav2::ServiceClient< ManageLifecycleNodes >::SharedPtr | manager_client_ |
| nav2::ServiceClient< std_srvs::srv::Trigger >::SharedPtr | is_active_client_ |
| std::string | manage_service_name_ |
| std::string | active_service_name_ |
Detailed Description
Definition at line 44 of file lifecycle_manager_client.hpp.
Constructor & Destructor Documentation
◆ LifecycleManagerClient()
|
inlineexplicit |
A constructor for LifeCycleMangerClient.
- Parameters
-
name Managed node name parent_node Node that execute the service calls
Definition at line 53 of file lifecycle_manager_client.hpp.
Member Function Documentation
◆ callService()
|
protected |
A generic method used to call startup, shutdown, etc.
- Parameters
-
command
Definition at line 102 of file lifecycle_manager_client.cpp.
References nav2::ServiceClient< ServiceT >::invoke(), and nav2::ServiceClient< ServiceT >::wait_for_service().
Referenced by cleanup(), configure(), pause(), reset(), resume(), shutdown(), and startup().

◆ cleanup()
| bool nav2_lifecycle_manager::LifecycleManagerClient::cleanup | ( | const std::chrono::nanoseconds | timeout = std::chrono::nanoseconds(-1) | ) |
Make cleanup service call.
- Returns
- true or false
Definition at line 65 of file lifecycle_manager_client.cpp.
References callService().

◆ configure()
| bool nav2_lifecycle_manager::LifecycleManagerClient::configure | ( | const std::chrono::nanoseconds | timeout = std::chrono::nanoseconds(-1) | ) |
Make configure service call.
- Returns
- true or false
Definition at line 59 of file lifecycle_manager_client.cpp.
References callService().

◆ is_active()
| SystemStatus nav2_lifecycle_manager::LifecycleManagerClient::is_active | ( | const std::chrono::nanoseconds | timeout = std::chrono::nanoseconds(-1) | ) |
Check if lifecycle node manager server is active.
- Returns
- ACTIVE or INACTIVE or TIMEOUT
Definition at line 71 of file lifecycle_manager_client.cpp.
References nav2::ServiceClient< ServiceT >::wait_for_service().

◆ pause()
| bool nav2_lifecycle_manager::LifecycleManagerClient::pause | ( | const std::chrono::nanoseconds | timeout = std::chrono::nanoseconds(-1) | ) |
Make pause service call.
- Returns
- true or false
Definition at line 41 of file lifecycle_manager_client.cpp.
References callService().

◆ reset()
| bool nav2_lifecycle_manager::LifecycleManagerClient::reset | ( | const std::chrono::nanoseconds | timeout = std::chrono::nanoseconds(-1) | ) |
Make reset service call.
- Returns
- true or false
Definition at line 53 of file lifecycle_manager_client.cpp.
References callService().

◆ resume()
| bool nav2_lifecycle_manager::LifecycleManagerClient::resume | ( | const std::chrono::nanoseconds | timeout = std::chrono::nanoseconds(-1) | ) |
Make resume service call.
- Returns
- true or false
Definition at line 47 of file lifecycle_manager_client.cpp.
References callService().

◆ shutdown()
| bool nav2_lifecycle_manager::LifecycleManagerClient::shutdown | ( | const std::chrono::nanoseconds | timeout = std::chrono::nanoseconds(-1) | ) |
Make shutdown service call.
- Returns
- true or false
Definition at line 35 of file lifecycle_manager_client.cpp.
References callService().

◆ startup()
| bool nav2_lifecycle_manager::LifecycleManagerClient::startup | ( | const std::chrono::nanoseconds | timeout = std::chrono::nanoseconds(-1) | ) |
Make start up service call.
- Returns
- true or false
Definition at line 29 of file lifecycle_manager_client.cpp.
References callService().

The documentation for this class was generated from the following files:
- nav2_lifecycle_manager/include/nav2_lifecycle_manager/lifecycle_manager_client.hpp
- nav2_lifecycle_manager/src/lifecycle_manager_client.cpp