Implements service interface to transition the lifecycle nodes of Nav2 stack. It receives transition request and then uses lifecycle interface to change lifecycle node's state. More...
#include <nav2_lifecycle_manager/include/nav2_lifecycle_manager/lifecycle_manager.hpp>
Public Member Functions | |
| LifecycleManager (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A constructor for nav2_lifecycle_manager::LifecycleManager. More... | |
| ~LifecycleManager () | |
| A destructor for nav2_lifecycle_manager::LifecycleManager. | |
Protected Member Functions | |
| void | managerCallback (const std::shared_ptr< rmw_request_id_t > request_header, const std::shared_ptr< ManageLifecycleNodes::Request > request, std::shared_ptr< ManageLifecycleNodes::Response > response) |
| Lifecycle node manager callback function. More... | |
| void | isActiveCallback (const std::shared_ptr< rmw_request_id_t > request_header, const std::shared_ptr< std_srvs::srv::Trigger::Request > request, std::shared_ptr< std_srvs::srv::Trigger::Response > response) |
| Trigger callback function checks if the managed nodes are in active state. More... | |
| bool | startup () |
| Start up managed nodes. More... | |
| bool | configure () |
| Configures the managed nodes. More... | |
| bool | cleanup () |
| Cleanups the managed nodes. More... | |
| bool | shutdown () |
| Deactivate, clean up and shut down all the managed nodes. More... | |
| bool | reset (bool hard_reset=false) |
| Reset all the managed nodes. More... | |
| bool | pause () |
| Pause all the managed nodes. More... | |
| bool | resume () |
| Resume all the managed nodes. More... | |
| void | onRclPreshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine or shutdown(). | |
| void | createLifecycleServiceClients () |
| Support function for creating service clients. | |
| void | createLifecycleServiceServers () |
| Support function for creating service servers. | |
| void | createLifecyclePublishers () |
| Support function for creating publishers. | |
| void | shutdownAllNodes () |
| Support function for shutdown. | |
| void | destroyLifecycleServiceClients () |
| Destroy all the lifecycle service clients. | |
| void | destroyLifecyclePublishers () |
| Destroy all the lifecycle publishers. | |
| void | createBondTimer () |
| Support function for creating bond timer. | |
| bool | createBondConnection (const std::string &node_name) |
| Support function for creating bond connections. | |
| void | destroyBondTimer () |
| Support function for killing bond connections. | |
| void | checkBondConnections () |
| void | checkBondRespawnConnection () |
| bool | changeStateForNode (const std::string &node_name, std::uint8_t transition) |
| For a node, transition to the new target state. | |
| bool | changeStateForAllNodes (std::uint8_t transition, bool hard_change=false) |
| For each node in the map, transition to the new target state. | |
| void | message (const std::string &msg) |
| Helper function to highlight the output on the console. | |
| void | CreateDiagnostic (diagnostic_updater::DiagnosticStatusWrapper &stat) |
| function to check the state of Nav2 nodes | |
| void | registerRclPreshutdownCallback () |
| void | setState (const NodeState &state) |
| Set the state of managed nodes. | |
| bool | isActive () |
| function to check if managed nodes are active | |
| void | publishIsActiveState () |
| Publish the is_active state. | |
Protected Attributes | |
| rclcpp::CallbackGroup::SharedPtr | callback_group_ |
| std::unique_ptr< nav2::NodeThread > | service_thread_ |
| nav2::ServiceServer< ManageLifecycleNodes >::SharedPtr | manager_srv_ |
| nav2::ServiceServer< std_srvs::srv::Trigger >::SharedPtr | is_active_srv_ |
| nav2::Publisher< std_msgs::msg::Bool >::SharedPtr | is_active_pub_ |
| rclcpp::TimerBase::SharedPtr | init_timer_ |
| rclcpp::TimerBase::SharedPtr | bond_timer_ |
| rclcpp::TimerBase::SharedPtr | bond_respawn_timer_ |
| std::chrono::milliseconds | bond_timeout_ |
| std::chrono::milliseconds | service_timeout_ |
| std::map< std::string, std::shared_ptr< bond::Bond > > | bond_map_ |
| std::map< std::string, std::shared_ptr< nav2_util::LifecycleServiceClient > > | node_map_ |
| std::map< std::uint8_t, std::string > | transition_label_map_ |
| std::unordered_map< std::uint8_t, std::uint8_t > | transition_state_map_ |
| std::vector< std::string > | node_names_ |
| bool | autostart_ |
| bool | attempt_respawn_reconnection_ |
| NodeState | managed_nodes_state_ {NodeState::UNCONFIGURED} |
| diagnostic_updater::Updater | diagnostics_updater_ |
| rclcpp::Time | bond_respawn_start_time_ {0} |
| rclcpp::Duration | bond_respawn_max_duration_ {10s} |
Detailed Description
Implements service interface to transition the lifecycle nodes of Nav2 stack. It receives transition request and then uses lifecycle interface to change lifecycle node's state.
Definition at line 62 of file lifecycle_manager.hpp.
Constructor & Destructor Documentation
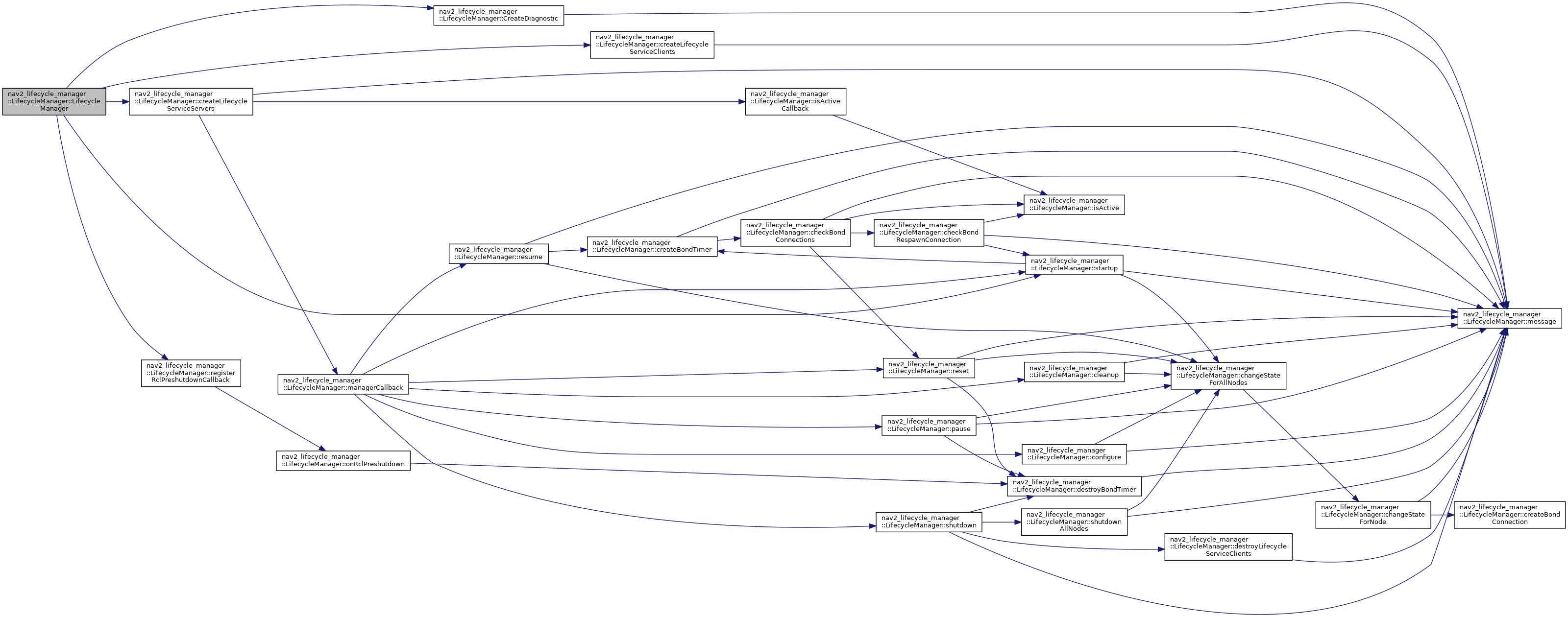
◆ LifecycleManager()
|
explicit |
A constructor for nav2_lifecycle_manager::LifecycleManager.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 35 of file lifecycle_manager.cpp.
References CreateDiagnostic(), createLifecyclePublishers(), createLifecycleServiceClients(), createLifecycleServiceServers(), registerRclPreshutdownCallback(), and startup().
Member Function Documentation
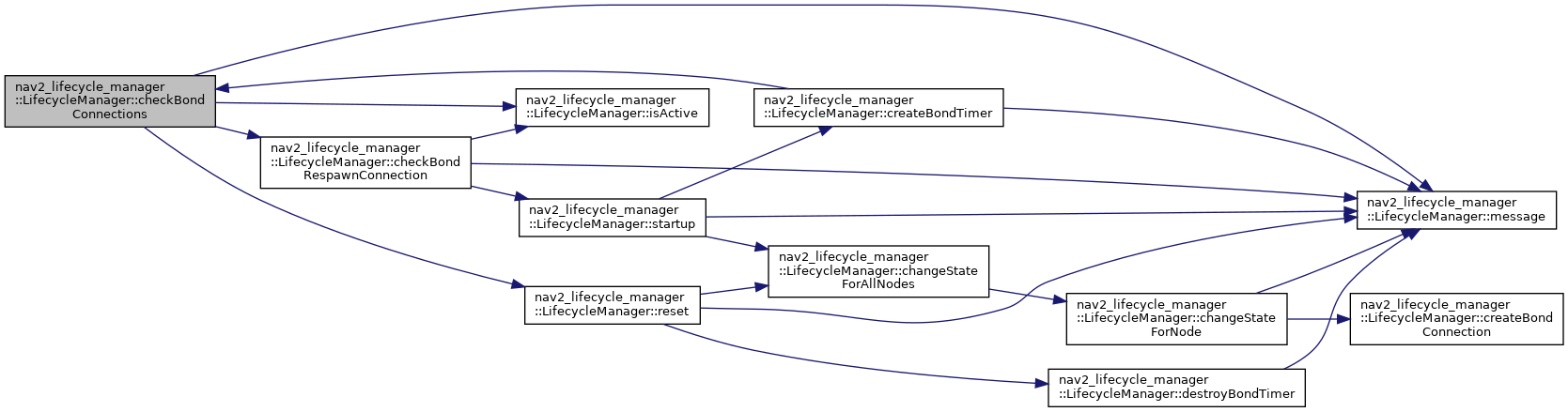
◆ checkBondConnections()
|
protected |
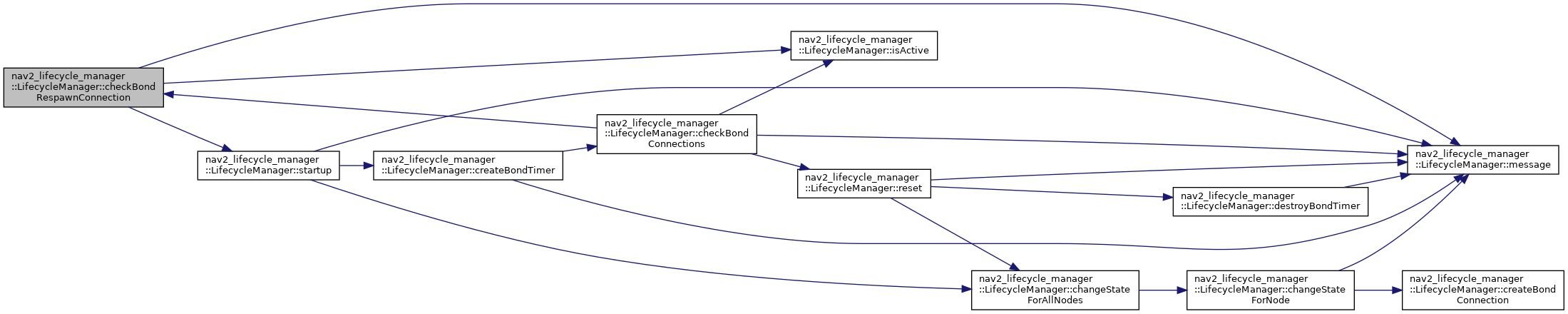
@ brief Support function for checking on bond connections will take down system if there's something non-responsive
Definition at line 538 of file lifecycle_manager.cpp.
References checkBondRespawnConnection(), isActive(), message(), and reset().
Referenced by createBondTimer().

◆ checkBondRespawnConnection()
|
protected |
@ brief Support function for checking on bond connections will bring back the system if something goes from non-responsive to responsive
Definition at line 578 of file lifecycle_manager.cpp.
References isActive(), message(), and startup().
Referenced by checkBondConnections().

◆ cleanup()
|
protected |
Cleanups the managed nodes.
- Returns
- true or false
Definition at line 403 of file lifecycle_manager.cpp.
References changeStateForAllNodes(), message(), and setState().
Referenced by managerCallback().


◆ configure()
|
protected |
Configures the managed nodes.
- Returns
- true or false
Definition at line 389 of file lifecycle_manager.cpp.
References changeStateForAllNodes(), message(), and setState().
Referenced by managerCallback().


◆ isActiveCallback()
|
protected |
Trigger callback function checks if the managed nodes are in active state.
- Parameters
-
request_header Header of the request request Service request response Service response
Definition at line 170 of file lifecycle_manager.cpp.
References isActive().
Referenced by createLifecycleServiceServers().


◆ managerCallback()
|
protected |
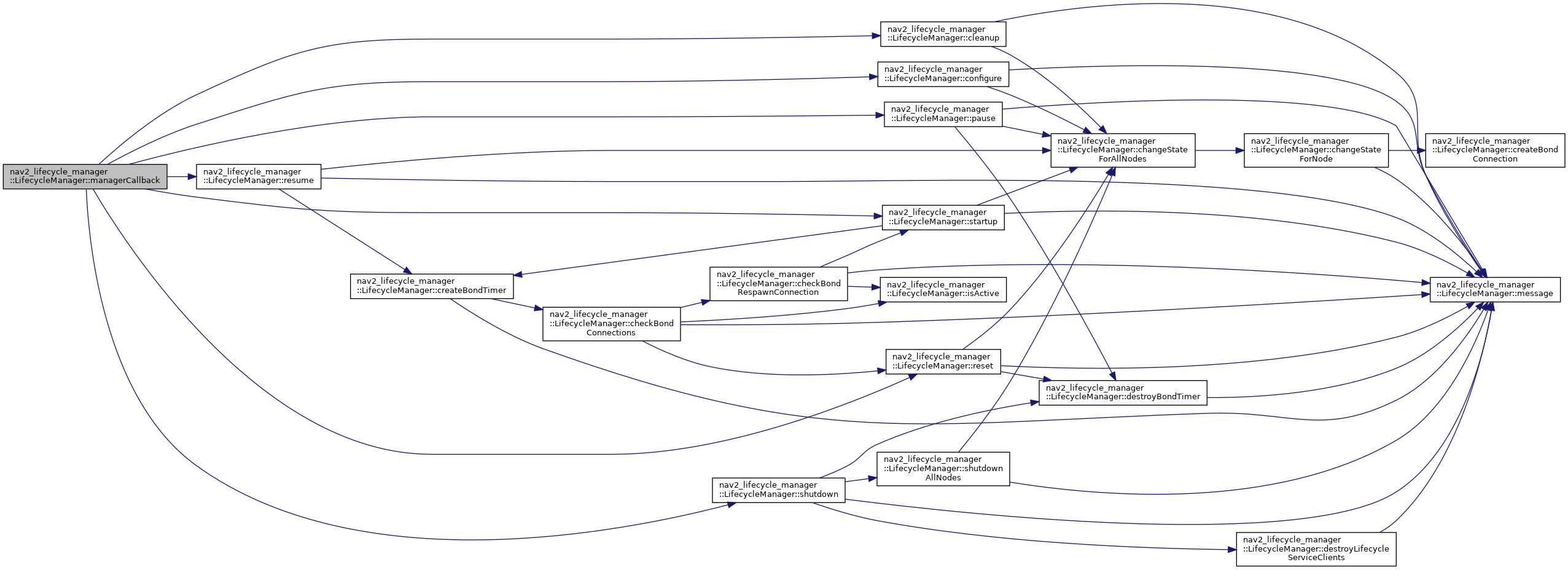
Lifecycle node manager callback function.
- Parameters
-
request_header Header of the service request request Service request response Service response
Definition at line 116 of file lifecycle_manager.cpp.
References cleanup(), configure(), pause(), reset(), resume(), shutdown(), and startup().
Referenced by createLifecycleServiceServers().

◆ pause()
|
protected |
Pause all the managed nodes.
- Returns
- true or false
Definition at line 452 of file lifecycle_manager.cpp.
References changeStateForAllNodes(), destroyBondTimer(), message(), and setState().
Referenced by managerCallback().


◆ registerRclPreshutdownCallback()
|
protected |
Register our preshutdown callback for this Node's rcl Context. The callback fires before this Node's Context is shutdown. Note this is not directly related to the lifecycle state machine or the shutdown() instance function.
Definition at line 528 of file lifecycle_manager.cpp.
References onRclPreshutdown().
Referenced by LifecycleManager().


◆ reset()
|
protected |
Reset all the managed nodes.
- Returns
- true or false
Definition at line 430 of file lifecycle_manager.cpp.
References changeStateForAllNodes(), destroyBondTimer(), message(), and setState().
Referenced by checkBondConnections(), and managerCallback().


◆ resume()
|
protected |
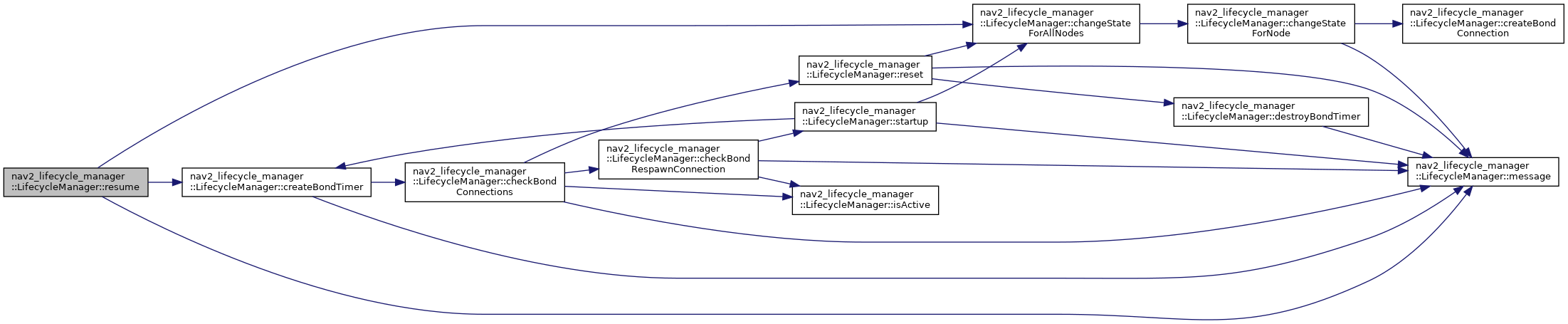
Resume all the managed nodes.
- Returns
- true or false
Definition at line 469 of file lifecycle_manager.cpp.
References changeStateForAllNodes(), createBondTimer(), message(), and setState().
Referenced by managerCallback().

◆ shutdown()
|
protected |
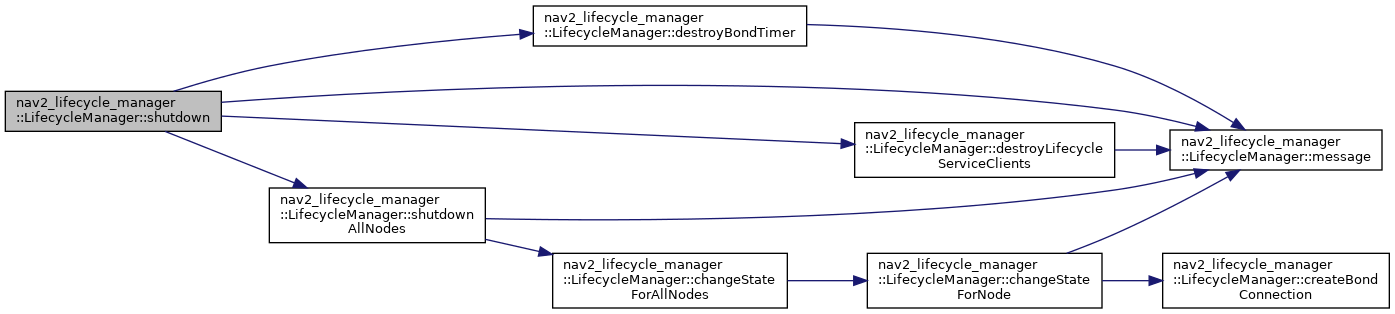
Deactivate, clean up and shut down all the managed nodes.
- Returns
- true or false
Definition at line 417 of file lifecycle_manager.cpp.
References destroyBondTimer(), destroyLifecyclePublishers(), destroyLifecycleServiceClients(), message(), and shutdownAllNodes().
Referenced by managerCallback().

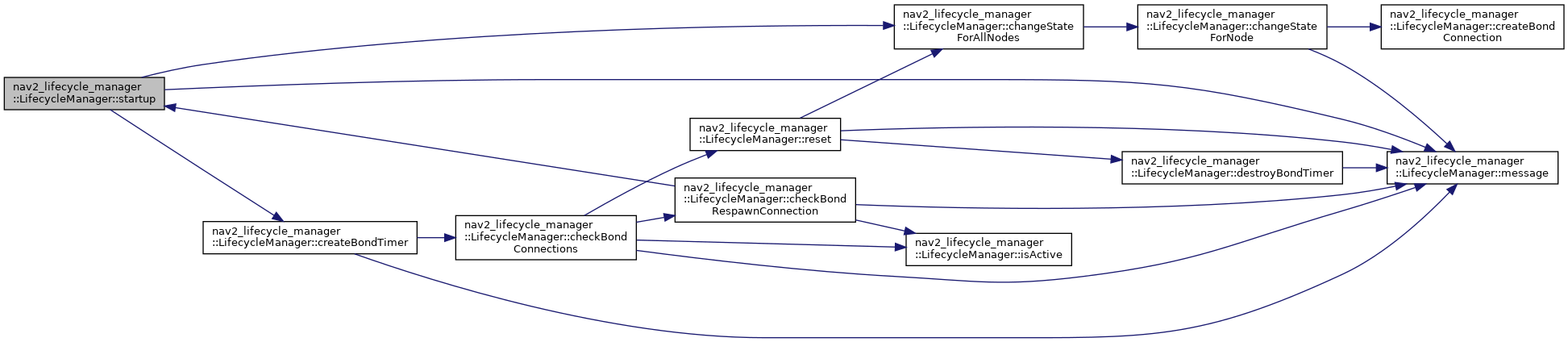
◆ startup()
|
protected |
Start up managed nodes.
- Returns
- true or false
Definition at line 372 of file lifecycle_manager.cpp.
References changeStateForAllNodes(), createBondTimer(), message(), and setState().
Referenced by checkBondRespawnConnection(), LifecycleManager(), and managerCallback().

The documentation for this class was generated from the following files:
- nav2_lifecycle_manager/include/nav2_lifecycle_manager/lifecycle_manager.hpp
- nav2_lifecycle_manager/src/lifecycle_manager.cpp