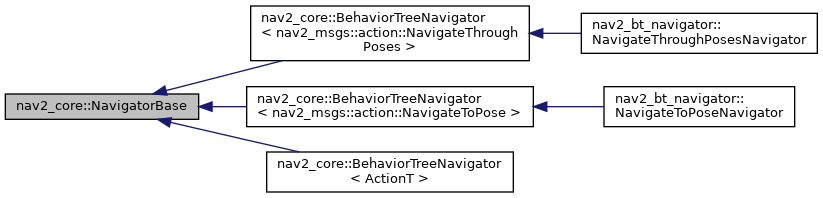
Navigator interface to allow navigators to be stored in a vector and accessed via pluginlib due to templates. These functions will be implemented by BehaviorTreeNavigator, not the user. The user should implement the virtual methods from BehaviorTreeNavigator to implement their navigator action. More...
#include <nav2_core/include/nav2_core/behavior_tree_navigator.hpp>
Public Member Functions | |
| virtual bool | on_configure (nav2::LifecycleNode::WeakPtr parent_node, const std::vector< std::string > &plugin_lib_names, const FeedbackUtils &feedback_utils, nav2_core::NavigatorMuxer *plugin_muxer, std::shared_ptr< nav2_util::OdomSmoother > odom_smoother)=0 |
| Configuration of the navigator's backend BT and actions. More... | |
| virtual bool | on_activate ()=0 |
| Activation of the navigator's backend BT and actions. More... | |
| virtual bool | on_deactivate ()=0 |
| Deactivation of the navigator's backend BT and actions. More... | |
| virtual bool | on_cleanup ()=0 |
| Cleanup a navigator. More... | |
Detailed Description
Navigator interface to allow navigators to be stored in a vector and accessed via pluginlib due to templates. These functions will be implemented by BehaviorTreeNavigator, not the user. The user should implement the virtual methods from BehaviorTreeNavigator to implement their navigator action.
Definition at line 116 of file behavior_tree_navigator.hpp.
Member Function Documentation
◆ on_activate()
|
pure virtual |
Activation of the navigator's backend BT and actions.
- Returns
- bool If successful
Implemented in nav2_core::BehaviorTreeNavigator< ActionT >, nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >, and nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateToPose >.
◆ on_cleanup()
|
pure virtual |
Cleanup a navigator.
- Returns
- bool If successful
Implemented in nav2_core::BehaviorTreeNavigator< ActionT >, nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >, and nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateToPose >.
◆ on_configure()
|
pure virtual |
Configuration of the navigator's backend BT and actions.
- Returns
- bool If successful
Implemented in nav2_core::BehaviorTreeNavigator< ActionT >, nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >, and nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateToPose >.
◆ on_deactivate()
|
pure virtual |
Deactivation of the navigator's backend BT and actions.
- Returns
- bool If successful
Implemented in nav2_core::BehaviorTreeNavigator< ActionT >, nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateThroughPoses >, and nav2_core::BehaviorTreeNavigator< nav2_msgs::action::NavigateToPose >.
The documentation for this class was generated from the following file:
- nav2_core/include/nav2_core/behavior_tree_navigator.hpp