A BT::ConditionNode that returns SUCCESS when the IsPathValid service returns true and FAILURE otherwise. More...
#include <nav2_behavior_tree/include/nav2_behavior_tree/plugins/condition/is_path_valid_condition.hpp>
Public Member Functions | |
| IsPathValidCondition (const std::string &condition_name, const BT::NodeConfiguration &conf) | |
| A constructor for nav2_behavior_tree::IsPathValidCondition. More... | |
| BT::NodeStatus | tick () override |
| The main override required by a BT action. More... | |
| void | initialize () |
| Function to read parameters and initialize class variables. | |
Static Public Member Functions | |
| static BT::PortsList | providedPorts () |
| Creates list of BT ports. More... | |
Detailed Description
A BT::ConditionNode that returns SUCCESS when the IsPathValid service returns true and FAILURE otherwise.
Definition at line 38 of file is_path_valid_condition.hpp.
Constructor & Destructor Documentation
◆ IsPathValidCondition()
| nav2_behavior_tree::IsPathValidCondition::IsPathValidCondition | ( | const std::string & | condition_name, |
| const BT::NodeConfiguration & | conf | ||
| ) |
A constructor for nav2_behavior_tree::IsPathValidCondition.
- Parameters
-
condition_name Name for the XML tag for this node conf BT node configuration
Definition at line 23 of file is_path_valid_condition.cpp.
Member Function Documentation
◆ providedPorts()
|
inlinestatic |
Creates list of BT ports.
- Returns
- BT::PortsList Containing node-specific ports
Definition at line 67 of file is_path_valid_condition.hpp.
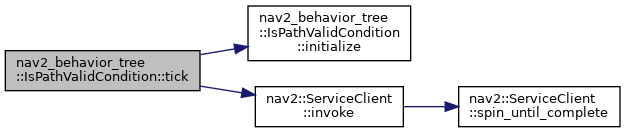
◆ tick()
|
override |
The main override required by a BT action.
- Returns
- BT::NodeStatus Status of tick execution
Definition at line 45 of file is_path_valid_condition.cpp.
References initialize(), and nav2::ServiceClient< ServiceT >::invoke().
The documentation for this class was generated from the following files:
- nav2_behavior_tree/include/nav2_behavior_tree/plugins/condition/is_path_valid_condition.hpp
- nav2_behavior_tree/plugins/condition/is_path_valid_condition.cpp