Inheritance diagram for nav2_behavior_tree::AreErrorCodesPresent:
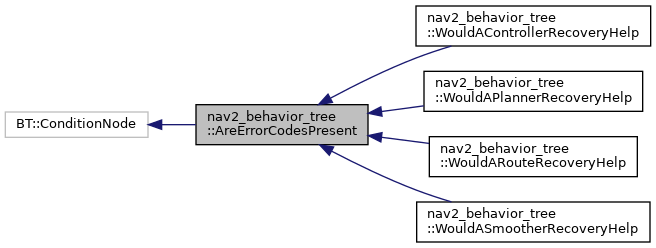
Collaboration diagram for nav2_behavior_tree::AreErrorCodesPresent:
Public Member Functions | |
| AreErrorCodesPresent (const std::string &condition_name, const BT::NodeConfiguration &conf) | |
| BT::NodeStatus | tick () |
Static Public Member Functions | |
| static BT::PortsList | providedPorts () |
Protected Attributes | |
| uint16_t | error_code_ |
| std::set< uint16_t > | error_codes_to_check_ |
Detailed Description
Definition at line 29 of file are_error_codes_present_condition.hpp.
The documentation for this class was generated from the following file:
- nav2_behavior_tree/include/nav2_behavior_tree/plugins/condition/are_error_codes_present_condition.hpp