Visualizes trajectories for debugging. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/tools/trajectory_visualizer.hpp>
Public Member Functions | |
| TrajectoryVisualizer ()=default | |
| Constructor for mppi::TrajectoryVisualizer. | |
| void | on_configure (nav2::LifecycleNode::WeakPtr parent, const std::string &name, const std::string &frame_id, ParametersHandler *parameters_handler) |
| Configure trajectory visualizer. More... | |
| void | on_cleanup () |
| Cleanup object on shutdown. | |
| void | on_activate () |
| Activate object. | |
| void | on_deactivate () |
| Deactivate object. | |
| void | add (const Eigen::ArrayXXf &trajectory, const std::string &marker_namespace, const builtin_interfaces::msg::Time &cmd_stamp) |
| Add an optimal trajectory to visualize. More... | |
| void | add (const models::Trajectories &trajectories, const std::string &marker_namespace) |
| Add candidate trajectories to visualize. More... | |
| void | visualize (const nav_msgs::msg::Path &plan) |
| Visualize the plan. More... | |
| void | reset () |
| Reset object. | |
Protected Attributes | |
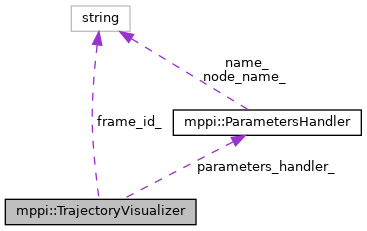
| std::string | frame_id_ |
| nav2::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr | trajectories_publisher_ |
| nav2::Publisher< nav_msgs::msg::Path >::SharedPtr | transformed_path_pub_ |
| nav2::Publisher< nav_msgs::msg::Path >::SharedPtr | optimal_path_pub_ |
| std::unique_ptr< nav_msgs::msg::Path > | optimal_path_ |
| std::unique_ptr< visualization_msgs::msg::MarkerArray > | points_ |
| int | marker_id_ = 0 |
| ParametersHandler * | parameters_handler_ |
| size_t | trajectory_step_ {0} |
| size_t | time_step_ {0} |
| rclcpp::Logger | logger_ {rclcpp::get_logger("MPPIController")} |
Detailed Description
Visualizes trajectories for debugging.
Definition at line 38 of file trajectory_visualizer.hpp.
Member Function Documentation
◆ add() [1/2]
| void mppi::TrajectoryVisualizer::add | ( | const Eigen::ArrayXXf & | trajectory, |
| const std::string & | marker_namespace, | ||
| const builtin_interfaces::msg::Time & | cmd_stamp | ||
| ) |
Add an optimal trajectory to visualize.
- Parameters
-
trajectory Optimal trajectory
Definition at line 64 of file trajectory_visualizer.cpp.
Referenced by nav2_mppi_controller::MPPIController::visualize().

◆ add() [2/2]
| void mppi::TrajectoryVisualizer::add | ( | const models::Trajectories & | trajectories, |
| const std::string & | marker_namespace | ||
| ) |
Add candidate trajectories to visualize.
- Parameters
-
trajectories Candidate trajectories
Definition at line 106 of file trajectory_visualizer.cpp.
◆ on_configure()
| void mppi::TrajectoryVisualizer::on_configure | ( | nav2::LifecycleNode::WeakPtr | parent, |
| const std::string & | name, | ||
| const std::string & | frame_id, | ||
| ParametersHandler * | parameters_handler | ||
| ) |
Configure trajectory visualizer.
- Parameters
-
parent WeakPtr to node name Name of plugin frame_id Frame to publish trajectories in dynamic_parameter_handler Parameter handler object
Definition at line 21 of file trajectory_visualizer.cpp.
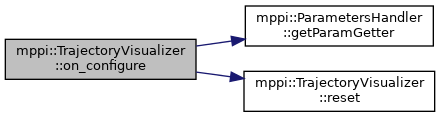
References mppi::ParametersHandler::getParamGetter(), and reset().
Referenced by nav2_mppi_controller::MPPIController::configure().

◆ visualize()
| void mppi::TrajectoryVisualizer::visualize | ( | const nav_msgs::msg::Path & | plan | ) |
Visualize the plan.
- Parameters
-
plan Plan to visualize
Definition at line 138 of file trajectory_visualizer.cpp.
References reset().
Referenced by nav2_mppi_controller::MPPIController::visualize().


The documentation for this class was generated from the following files:
- nav2_mppi_controller/include/nav2_mppi_controller/tools/trajectory_visualizer.hpp
- nav2_mppi_controller/src/trajectory_visualizer.cpp