This class hosts variety of plugins of different algorithms to smooth or refine a path from the exposed SmoothPath action server. More...
#include <nav2_smoother/include/nav2_smoother/nav2_smoother.hpp>
Public Types | |
| using | SmootherMap = std::unordered_map< std::string, nav2_core::Smoother::Ptr > |
Public Member Functions | |
| SmootherServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A constructor for nav2_smoother::SmootherServer. More... | |
| ~SmootherServer () | |
| Destructor for nav2_smoother::SmootherServer. | |
 Public Member Functions inherited from nav2_util::LifecycleNode Public Member Functions inherited from nav2_util::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns="", const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has no integer or floating point range constraints. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const floating_point_range fp_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has a floating point range constraint. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const integer_range int_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has an integer range constraint. More... | |
| std::shared_ptr< nav2_util::LifecycleNode > | shared_from_this () |
| Get a shared pointer of this. | |
| nav2_util::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| void | autostart () |
| Automatically configure and active the node. | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Types | |
| using | Action = nav2_msgs::action::SmoothPath |
| using | ActionResult = Action::Result |
| using | ActionServer = nav2_util::SimpleActionServer< Action > |
Protected Member Functions | |
| nav2_util::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| Configures smoother parameters and member variables. More... | |
| bool | loadSmootherPlugins () |
| Loads smoother plugins from parameter file. More... | |
| nav2_util::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| Activates member variables. More... | |
| nav2_util::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| Deactivates member variables. More... | |
| nav2_util::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| Calls clean up states and resets member variables. More... | |
| nav2_util::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| Called when in Shutdown state. More... | |
| void | smoothPlan () |
| SmoothPath action server callback. Handles action server updates and spins server until goal is reached. More... | |
| bool | findSmootherId (const std::string &c_name, std::string &name) |
| Find the valid smoother ID name for the given request. More... | |
| bool | validate (const nav_msgs::msg::Path &path) |
| Validate that the path contains a meaningful path for smoothing. More... | |
| Protected Member Functions inherited from nav2_util::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| std::unique_ptr< ActionServer > | action_server_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_ |
| std::shared_ptr< tf2_ros::TransformListener > | transform_listener_ |
| rclcpp_lifecycle::LifecyclePublisher< nav_msgs::msg::Path >::SharedPtr | plan_publisher_ |
| pluginlib::ClassLoader< nav2_core::Smoother > | lp_loader_ |
| SmootherMap | smoothers_ |
| std::vector< std::string > | default_ids_ |
| std::vector< std::string > | default_types_ |
| std::vector< std::string > | smoother_ids_ |
| std::vector< std::string > | smoother_types_ |
| std::string | smoother_ids_concat_ |
| std::string | current_smoother_ |
| std::shared_ptr< nav2_costmap_2d::CostmapSubscriber > | costmap_sub_ |
| std::shared_ptr< nav2_costmap_2d::FootprintSubscriber > | footprint_sub_ |
| std::shared_ptr< nav2_costmap_2d::CostmapTopicCollisionChecker > | collision_checker_ |
| Protected Attributes inherited from nav2_util::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::shared_ptr< bond::Bond > | bond_ {nullptr} |
| double | bond_heartbeat_period |
| rclcpp::TimerBase::SharedPtr | autostart_timer_ |
Detailed Description
This class hosts variety of plugins of different algorithms to smooth or refine a path from the exposed SmoothPath action server.
Definition at line 45 of file nav2_smoother.hpp.
Constructor & Destructor Documentation
◆ SmootherServer()
|
explicit |
A constructor for nav2_smoother::SmootherServer.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 35 of file nav2_smoother.cpp.
Member Function Documentation
◆ findSmootherId()
|
protected |
Find the valid smoother ID name for the given request.
- Parameters
-
c_name The requested smoother name name Reference to the name to use for control if any valid available
- Returns
- bool Whether it found a valid smoother to use
Definition at line 225 of file nav2_smoother.cpp.
Referenced by smoothPlan().

◆ loadSmootherPlugins()
|
protected |
Loads smoother plugins from parameter file.
- Returns
- bool if successfully loaded the plugins
Definition at line 120 of file nav2_smoother.cpp.
References nav2_util::LifecycleNode::shared_from_this().
Referenced by on_configure().


◆ on_activate()
|
overrideprotected |
Activates member variables.
Activates smoother, costmap, velocity publisher and smooth path action server
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 159 of file nav2_smoother.cpp.
References nav2_util::LifecycleNode::createBond().

◆ on_cleanup()
|
overrideprotected |
Calls clean up states and resets member variables.
Smoother and costmap clean up state is called, and resets rest of the variables
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 195 of file nav2_smoother.cpp.
Referenced by on_configure().

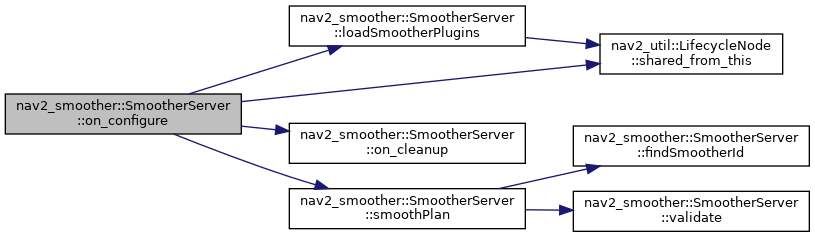
◆ on_configure()
|
overrideprotected |
Configures smoother parameters and member variables.
Configures smoother plugin and costmap; Initialize odom subscriber, velocity publisher and smooth path action server.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
- Exceptions
-
pluginlib::PluginlibException When failed to initialize smoother plugin
Definition at line 64 of file nav2_smoother.cpp.
References loadSmootherPlugins(), on_cleanup(), nav2_util::LifecycleNode::shared_from_this(), and smoothPlan().
◆ on_deactivate()
|
overrideprotected |
Deactivates member variables.
Deactivates smooth path action server, smoother, costmap and velocity publisher. Before calling deactivate state, velocity is being set to zero.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 177 of file nav2_smoother.cpp.
References nav2_util::LifecycleNode::destroyBond().

◆ on_shutdown()
|
overrideprotected |
Called when in Shutdown state.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 219 of file nav2_smoother.cpp.
◆ smoothPlan()
|
protected |
SmoothPath action server callback. Handles action server updates and spins server until goal is reached.
Provides global path to smoother received from action client. Local section of the path is optimized using smoother.
- Exceptions
-
nav2_core::PlannerException
Definition at line 254 of file nav2_smoother.cpp.
References findSmootherId(), and validate().
Referenced by on_configure().

◆ validate()
|
protected |
Validate that the path contains a meaningful path for smoothing.
- Parameters
-
path current path return bool if the path is valid
Definition at line 372 of file nav2_smoother.cpp.
Referenced by smoothPlan().

The documentation for this class was generated from the following files:
- nav2_smoother/include/nav2_smoother/nav2_smoother.hpp
- nav2_smoother/src/nav2_smoother.cpp