Public Member Functions | |
| None | __init__ (self, OccupancyGrid occupancy_map) |
| int | getSizeInCellsX (self) |
| int | getSizeInCellsY (self) |
| float | getSizeInMetersX (self) |
| float | getSizeInMetersY (self) |
| float | getOriginX (self) |
| float | getOriginY (self) |
| float | getResolution (self) |
| str | getGlobalFrameID (self) |
| Time | getCostmapTimestamp (self) |
| np.uint8 | getCostXY (self, int mx, int my) |
| np.uint8 | getCostIdx (self, int index) |
| None | setCost (self, int mx, int my, np.uint8 cost) |
| tuple[float, float] | mapToWorld (self, int mx, int my) |
| tuple[Optional[int], Optional[int]] | worldToMapValidated (self, float wx, float wy) |
| int | getIndex (self, int mx, int my) |
Detailed Description
PyCostmap2D. Costmap Python3 API for OccupancyGrids to populate from published messages
Definition at line 34 of file costmap_2d.py.
Constructor & Destructor Documentation
◆ __init__()
| None nav2_simple_commander.costmap_2d.PyCostmap2D.__init__ | ( | self, | |
| OccupancyGrid | occupancy_map | ||
| ) |
Initialize costmap2D.
Args
----
occupancy_map (OccupancyGrid): 2D OccupancyGrid Map
Returns
-------
None
Definition at line 41 of file costmap_2d.py.
References nav2_voxel_grid::VoxelGrid.costmap, map_t.origin_x, map_t.origin_y, nav2_map_server::LoadParameters.resolution, map_t.size_x, nav2_smac_planner::HybridMotionTable.size_x, nav2_smac_planner::LatticeMotionTable.size_x, and map_t.size_y.
Member Function Documentation
◆ getCostIdx()
| np.uint8 nav2_simple_commander.costmap_2d.PyCostmap2D.getCostIdx | ( | self, | |
| int | index | ||
| ) |
Get the cost of a cell in the costmap using Index.
Args
----
index (int): index of cell to get cost
Returns
-------
np.uint8: cost of a cell
Definition at line 116 of file costmap_2d.py.
References nav2_voxel_grid::VoxelGrid.costmap.
◆ getCostmapTimestamp()
| Time nav2_simple_commander.costmap_2d.PyCostmap2D.getCostmapTimestamp | ( | self | ) |
Get costmap timestamp.
Definition at line 96 of file costmap_2d.py.
◆ getCostXY()
| np.uint8 nav2_simple_commander.costmap_2d.PyCostmap2D.getCostXY | ( | self, | |
| int | mx, | ||
| int | my | ||
| ) |
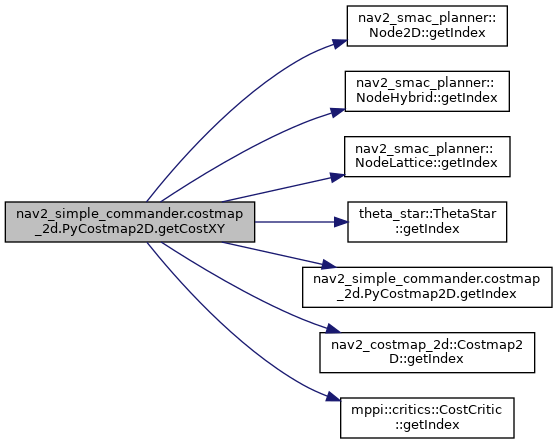
Get the cost of a cell in the costmap using map coordinate XY.
Args
----
mx (int): map coordinate X to get cost
my (int): map coordinate Y to get cost
Returns
-------
np.uint8: cost of a cell
Definition at line 100 of file costmap_2d.py.
References nav2_voxel_grid::VoxelGrid.costmap, nav2_smac_planner::Node2D.getIndex(), nav2_smac_planner::NodeHybrid.getIndex(), nav2_smac_planner::NodeLattice.getIndex(), theta_star::ThetaStar.getIndex(), nav2_simple_commander.costmap_2d.PyCostmap2D.getIndex(), nav2_costmap_2d::Costmap2D.getIndex(), and mppi::critics::CostCritic.getIndex().
◆ getGlobalFrameID()
| str nav2_simple_commander.costmap_2d.PyCostmap2D.getGlobalFrameID | ( | self | ) |
Get global frame_id.
Definition at line 92 of file costmap_2d.py.
◆ getIndex()
| int nav2_simple_commander.costmap_2d.PyCostmap2D.getIndex | ( | self, | |
| int | mx, | ||
| int | my | ||
| ) |
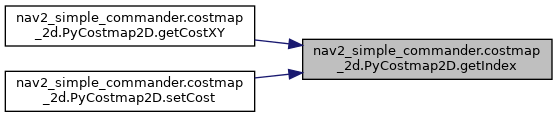
Get the index of the cell using map coordinate XY.
Args
----
mx (int): map coordinate X to get Index
my (int): map coordinate Y to get Index
Returns
-------
int: The index of the cell
Definition at line 193 of file costmap_2d.py.
References map_t.size_x, nav2_smac_planner::HybridMotionTable.size_x, and nav2_smac_planner::LatticeMotionTable.size_x.
Referenced by nav2_simple_commander.costmap_2d.PyCostmap2D.getCostXY(), and nav2_simple_commander.costmap_2d.PyCostmap2D.setCost().
◆ getOriginX()
| float nav2_simple_commander.costmap_2d.PyCostmap2D.getOriginX | ( | self | ) |
Get the origin x axis of the map [m].
Definition at line 80 of file costmap_2d.py.
References map_t.origin_x.
◆ getOriginY()
| float nav2_simple_commander.costmap_2d.PyCostmap2D.getOriginY | ( | self | ) |
Get the origin y axis of the map [m].
Definition at line 84 of file costmap_2d.py.
References map_t.origin_y.
◆ getResolution()
| float nav2_simple_commander.costmap_2d.PyCostmap2D.getResolution | ( | self | ) |
Get map resolution [m/cell].
Definition at line 88 of file costmap_2d.py.
References nav2_map_server::LoadParameters.resolution.
◆ getSizeInCellsX()
| int nav2_simple_commander.costmap_2d.PyCostmap2D.getSizeInCellsX | ( | self | ) |
Get map width in cells.
Definition at line 64 of file costmap_2d.py.
References map_t.size_x, nav2_smac_planner::HybridMotionTable.size_x, and nav2_smac_planner::LatticeMotionTable.size_x.
◆ getSizeInCellsY()
| int nav2_simple_commander.costmap_2d.PyCostmap2D.getSizeInCellsY | ( | self | ) |
◆ getSizeInMetersX()
| float nav2_simple_commander.costmap_2d.PyCostmap2D.getSizeInMetersX | ( | self | ) |
Get x axis map size in meters.
Definition at line 72 of file costmap_2d.py.
References nav2_map_server::LoadParameters.resolution, map_t.size_x, nav2_smac_planner::HybridMotionTable.size_x, and nav2_smac_planner::LatticeMotionTable.size_x.
◆ getSizeInMetersY()
| float nav2_simple_commander.costmap_2d.PyCostmap2D.getSizeInMetersY | ( | self | ) |
Get y axis map size in meters.
Definition at line 76 of file costmap_2d.py.
References nav2_map_server::LoadParameters.resolution, and map_t.size_y.
◆ mapToWorld()
| tuple[float, float] nav2_simple_commander.costmap_2d.PyCostmap2D.mapToWorld | ( | self, | |
| int | mx, | ||
| int | my | ||
| ) |
Get the world coordinate XY using map coordinate XY.
Args
----
mx (int): map coordinate X to get world coordinate
my (int): map coordinate Y to get world coordinate
Returns
-------
tuple of float: wx, wy
wx (float) [m]: world coordinate X
wy (float) [m]: world coordinate Y
Definition at line 148 of file costmap_2d.py.
References map_t.origin_x, map_t.origin_y, and nav2_map_server::LoadParameters.resolution.
◆ setCost()
| None nav2_simple_commander.costmap_2d.PyCostmap2D.setCost | ( | self, | |
| int | mx, | ||
| int | my, | ||
| np.uint8 | cost | ||
| ) |
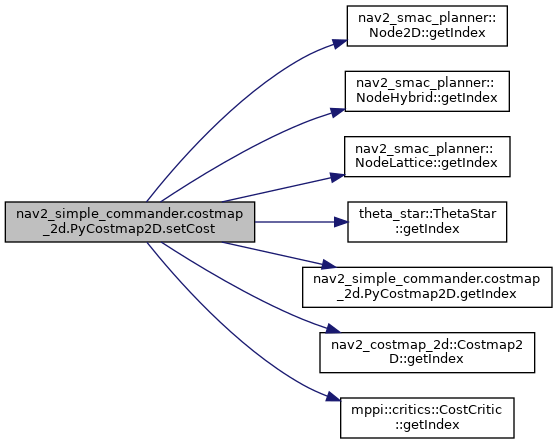
Set the cost of a cell in the costmap using map coordinate XY.
Args
----
mx (int): map coordinate X to get cost
my (int): map coordinate Y to get cost
cost (np.uint8): The cost to set the cell
Returns
-------
None
Definition at line 131 of file costmap_2d.py.
References nav2_voxel_grid::VoxelGrid.costmap, nav2_smac_planner::Node2D.getIndex(), nav2_smac_planner::NodeHybrid.getIndex(), nav2_smac_planner::NodeLattice.getIndex(), theta_star::ThetaStar.getIndex(), nav2_simple_commander.costmap_2d.PyCostmap2D.getIndex(), nav2_costmap_2d::Costmap2D.getIndex(), and mppi::critics::CostCritic.getIndex().
◆ worldToMapValidated()
| tuple[Optional[int], Optional[int]] nav2_simple_commander.costmap_2d.PyCostmap2D.worldToMapValidated | ( | self, | |
| float | wx, | ||
| float | wy | ||
| ) |
Get the map coordinate XY using world coordinate XY.
Args
----
wx (float) [m]: world coordinate X to get map coordinate
wy (float) [m]: world coordinate Y to get map coordinate
Returns
-------
(None, None): if coordinates are invalid
tuple of int: mx, my (if coordinates are valid)
mx (int): map coordinate X
my (int): map coordinate Y
Definition at line 168 of file costmap_2d.py.
References map_t.origin_x, map_t.origin_y, nav2_map_server::LoadParameters.resolution, map_t.size_x, nav2_smac_planner::HybridMotionTable.size_x, nav2_smac_planner::LatticeMotionTable.size_x, and map_t.size_y.
Referenced by nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.footprintCost().

The documentation for this class was generated from the following file:
- nav2_simple_commander/nav2_simple_commander/costmap_2d.py