An helper to convert the route into dense paths. More...
#include <nav2_route/include/nav2_route/path_converter.hpp>
Public Member Functions | |
| PathConverter ()=default | |
| A constructor for nav2_route::PathConverter. | |
| ~PathConverter ()=default | |
| A destructor for nav2_route::PathConverter. | |
| void | configure (nav2_util::LifecycleNode::SharedPtr node) |
| Configure the object. More... | |
| nav_msgs::msg::Path | densify (const Route &route, const ReroutingState &rerouting_info, const std::string &frame, const rclcpp::Time &now) |
| Convert a Route into a dense path. More... | |
| void | interpolateEdge (float x0, float y0, float x1, float y1, std::vector< geometry_msgs::msg::PoseStamped > &poses) |
| Convert an individual edge into a dense line. More... | |
Detailed Description
An helper to convert the route into dense paths.
Definition at line 37 of file path_converter.hpp.
Member Function Documentation
◆ configure()
| void nav2_route::PathConverter::configure | ( | nav2_util::LifecycleNode::SharedPtr | node | ) |
Configure the object.
- Parameters
-
node Node to use to get params and create interfaces
Definition at line 27 of file path_converter.cpp.
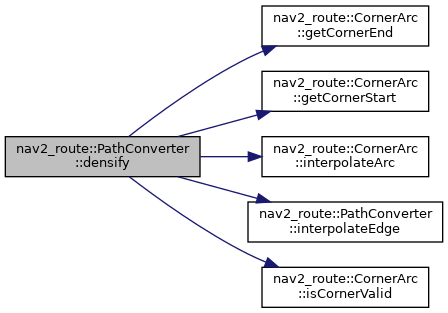
◆ densify()
| nav_msgs::msg::Path nav2_route::PathConverter::densify | ( | const Route & | route, |
| const ReroutingState & | rerouting_info, | ||
| const std::string & | frame, | ||
| const rclcpp::Time & | now | ||
| ) |
Convert a Route into a dense path.
- Parameters
-
route Route object rerouting_info Re-Route info in case partial path to be populated frame Frame ID from planning now Time
- Returns
- Path of the route
Definition at line 45 of file path_converter.cpp.
References nav2_route::CornerArc::getCornerEnd(), nav2_route::CornerArc::getCornerStart(), nav2_route::CornerArc::interpolateArc(), interpolateEdge(), and nav2_route::CornerArc::isCornerValid().
Here is the call graph for this function:
◆ interpolateEdge()
| void nav2_route::PathConverter::interpolateEdge | ( | float | x0, |
| float | y0, | ||
| float | x1, | ||
| float | y1, | ||
| std::vector< geometry_msgs::msg::PoseStamped > & | poses | ||
| ) |
Convert an individual edge into a dense line.
- Parameters
-
x0 X initial y0 Y initial x1 X final y1 Y final poses Pose vector reference to populate
Definition at line 137 of file path_converter.cpp.
Referenced by densify().
Here is the caller graph for this function:

The documentation for this class was generated from the following files:
- nav2_route/include/nav2_route/path_converter.hpp
- nav2_route/src/path_converter.cpp