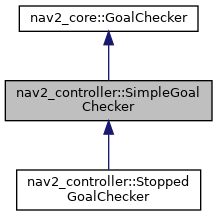
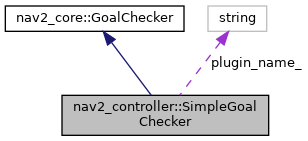
Goal Checker plugin that only checks the position difference. More...
#include <nav2_controller/include/nav2_controller/plugins/simple_goal_checker.hpp>
Public Member Functions | |
| void | initialize (const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, const std::string &plugin_name, const std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros) override |
| Initialize any parameters from the NodeHandle. More... | |
| void | reset () override |
| bool | isGoalReached (const geometry_msgs::msg::Pose &query_pose, const geometry_msgs::msg::Pose &goal_pose, const geometry_msgs::msg::Twist &velocity) override |
| Check whether the goal should be considered reached. More... | |
| bool | getTolerances (geometry_msgs::msg::Pose &pose_tolerance, geometry_msgs::msg::Twist &vel_tolerance) override |
| Get the maximum possible tolerances used for goal checking in the major types. Any field without a valid entry is replaced with std::numeric_limits<double>::lowest() to indicate that it is not measured. For tolerance across multiple entries (e.x. XY tolerances), both fields will contain this value since it is the maximum tolerance that each independent field could be assuming the other has no error (e.x. X and Y). More... | |
Protected Member Functions | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
Additional Inherited Members | |
 Public Types inherited from nav2_core::GoalChecker Public Types inherited from nav2_core::GoalChecker | |
| typedef std::shared_ptr< nav2_core::GoalChecker > | Ptr |
Detailed Description
Goal Checker plugin that only checks the position difference.
This class can be stateful if the stateful parameter is set to true (which it is by default). This means that the goal checker will not check if the xy position matches again once it is found to be true.
Definition at line 57 of file simple_goal_checker.hpp.
Member Function Documentation
◆ dynamicParametersCallback()
|
protected |
Callback executed when a parameter change is detected.
- Parameters
-
parameters list of changed parameters
Definition at line 144 of file simple_goal_checker.cpp.
◆ getTolerances()
|
overridevirtual |
Get the maximum possible tolerances used for goal checking in the major types. Any field without a valid entry is replaced with std::numeric_limits<double>::lowest() to indicate that it is not measured. For tolerance across multiple entries (e.x. XY tolerances), both fields will contain this value since it is the maximum tolerance that each independent field could be assuming the other has no error (e.x. X and Y).
- Parameters
-
pose_tolerance The tolerance used for checking in Pose fields vel_tolerance The tolerance used for checking velocity fields
- Returns
- True if the tolerances are valid to use
Implements nav2_core::GoalChecker.
Reimplemented in nav2_controller::StoppedGoalChecker.
Definition at line 120 of file simple_goal_checker.cpp.
◆ initialize()
|
overridevirtual |
Initialize any parameters from the NodeHandle.
- Parameters
-
parent Node pointer for grabbing parameters
Implements nav2_core::GoalChecker.
Reimplemented in nav2_controller::StoppedGoalChecker.
Definition at line 64 of file simple_goal_checker.cpp.
◆ isGoalReached()
|
overridevirtual |
Check whether the goal should be considered reached.
- Parameters
-
query_pose The pose to check goal_pose The pose to check against velocity The robot's current velocity
- Returns
- True if goal is reached
Implements nav2_core::GoalChecker.
Reimplemented in nav2_controller::StoppedGoalChecker.
Definition at line 98 of file simple_goal_checker.cpp.
The documentation for this class was generated from the following files:
- nav2_controller/include/nav2_controller/plugins/simple_goal_checker.hpp
- nav2_controller/plugins/simple_goal_checker.cpp