Circle shape implementation. For STOP/SLOWDOWN/LIMIT model it represents zone around the robot while for APPROACH model it represents robot footprint. More...
#include <nav2_collision_monitor/include/nav2_collision_monitor/circle.hpp>
Public Member Functions | |
| Circle (const nav2_util::LifecycleNode::WeakPtr &node, const std::string &polygon_name, const std::shared_ptr< tf2_ros::Buffer > tf_buffer, const std::string &base_frame_id, const tf2::Duration &transform_tolerance) | |
| Circle class constructor. More... | |
| ~Circle () | |
| Circle class destructor. | |
| void | getPolygon (std::vector< Point > &poly) const override |
| Gets polygon points, approximated to the circle. To be used in visualization purposes. More... | |
| int | getPointsInside (const std::vector< Point > &points) const override |
| Gets number of points inside circle. More... | |
| bool | isShapeSet () override |
| Returns true if circle radius is set. Otherwise, prints a warning and returns false. | |
 Public Member Functions inherited from nav2_collision_monitor::Polygon Public Member Functions inherited from nav2_collision_monitor::Polygon | |
| Polygon (const nav2_util::LifecycleNode::WeakPtr &node, const std::string &polygon_name, const std::shared_ptr< tf2_ros::Buffer > tf_buffer, const std::string &base_frame_id, const tf2::Duration &transform_tolerance) | |
| Polygon constructor. More... | |
| virtual | ~Polygon () |
| Polygon destructor. | |
| bool | configure () |
| Shape configuration routine. Obtains ROS-parameters related to shape object and creates polygon lifecycle publisher. More... | |
| void | activate () |
| Activates polygon lifecycle publisher. | |
| void | deactivate () |
| Deactivates polygon lifecycle publisher. | |
| std::string | getName () const |
| Returns the name of polygon. More... | |
| ActionType | getActionType () const |
| Obtains polygon action type. More... | |
| bool | getEnabled () const |
| Obtains polygon enabled state. More... | |
| int | getMinPoints () const |
| Obtains polygon minimum points to enter inside polygon causing the action. More... | |
| double | getSlowdownRatio () const |
| Obtains speed slowdown ratio for current polygon. Applicable for SLOWDOWN model. More... | |
| double | getLinearLimit () const |
| Obtains speed linear limit for current polygon. Applicable for LIMIT model. More... | |
| double | getAngularLimit () const |
| Obtains speed angular z limit for current polygon. Applicable for LIMIT model. More... | |
| double | getTimeBeforeCollision () const |
| Obtains required time before collision for current polygon. Applicable for APPROACH model. More... | |
| std::vector< std::string > | getSourcesNames () const |
| Obtains the name of the observation sources for current polygon. More... | |
| virtual void | updatePolygon (const Velocity &) |
| Updates polygon from footprint subscriber (if any) | |
| virtual int | getPointsInside (const std::unordered_map< std::string, std::vector< Point >> &sources_collision_points_map) const |
| Gets number of points inside given polygon. More... | |
| double | getCollisionTime (const std::unordered_map< std::string, std::vector< Point >> &sources_collision_points_map, const Velocity &velocity) const |
| Obtains estimated (simulated) time before a collision. Applicable for APPROACH model. More... | |
| void | publish () |
| Publishes polygon message into a its own topic. | |
Protected Member Functions | |
| bool | getParameters (std::string &polygon_sub_topic, std::string &polygon_pub_topic, std::string &footprint_topic) override |
| Supporting routine obtaining polygon-specific ROS-parameters. More... | |
| void | createSubscription (std::string &polygon_sub_topic) override |
| Creates polygon or radius topic subscription. More... | |
| void | updatePolygon (double radius) |
| Updates polygon from radius value. More... | |
| void | radiusCallback (std_msgs::msg::Float32::ConstSharedPtr msg) |
| Dynamic circle radius callback. More... | |
| Protected Member Functions inherited from nav2_collision_monitor::Polygon | |
| bool | getCommonParameters (std::string &polygon_sub_topic, std::string &polygon_pub_topic, std::string &footprint_topic, bool use_dynamic_sub=false) |
| Supporting routine obtaining ROS-parameters common for all shapes. More... | |
| void | updatePolygon (geometry_msgs::msg::PolygonStamped::ConstSharedPtr msg) |
| Updates polygon from geometry_msgs::msg::PolygonStamped message. More... | |
| void | polygonCallback (geometry_msgs::msg::PolygonStamped::ConstSharedPtr msg) |
| Dynamic polygon callback. More... | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
| bool | isPointInside (const Point &point) const |
| Checks if point is inside polygon. More... | |
| bool | getPolygonFromString (std::string &poly_string, std::vector< Point > &polygon) |
| Extracts Polygon points from a string with of the form [[x1,y1],[x2,y2],[x3,y3]...]. More... | |
Protected Attributes | |
| double | radius_ |
| Radius of the circle. | |
| double | radius_squared_ = -1.0 |
| (radius * radius) value. Stored for optimization. | |
| rclcpp::Subscription< std_msgs::msg::Float32 >::SharedPtr | radius_sub_ |
| Radius subscription. | |
| Protected Attributes inherited from nav2_collision_monitor::Polygon | |
| nav2_util::LifecycleNode::WeakPtr | node_ |
| Collision Monitor node. | |
| rclcpp::Logger | logger_ {rclcpp::get_logger("collision_monitor")} |
| Collision monitor node logger stored for further usage. | |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| Dynamic parameters handler. | |
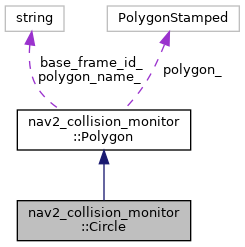
| std::string | polygon_name_ |
| Name of polygon. | |
| ActionType | action_type_ |
| Action type for the polygon. | |
| int | min_points_ |
| Minimum number of data readings within a zone to trigger the action. | |
| double | slowdown_ratio_ |
| Robot slowdown (share of its actual speed) | |
| double | linear_limit_ |
| Robot linear limit. | |
| double | angular_limit_ |
| Robot angular limit. | |
| double | time_before_collision_ |
| Time before collision in seconds. | |
| double | simulation_time_step_ |
| Time step for robot movement simulation. | |
| bool | enabled_ |
| Whether polygon is enabled. | |
| bool | polygon_subscribe_transient_local_ |
| Whether the subscription to polygon topic has transient local QoS durability. | |
| rclcpp::Subscription< geometry_msgs::msg::PolygonStamped >::SharedPtr | polygon_sub_ |
| Polygon subscription. | |
| std::unique_ptr< nav2_costmap_2d::FootprintSubscriber > | footprint_sub_ |
| Footprint subscriber. | |
| std::vector< std::string > | sources_names_ |
| Name of the observation sources to check for polygon. | |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| TF buffer. | |
| std::string | base_frame_id_ |
| Base frame ID. | |
| tf2::Duration | transform_tolerance_ |
| Transform tolerance. | |
| rclcpp::Clock::SharedPtr | node_clock_ |
| Collision monitor node's clock. | |
| bool | visualize_ |
| Whether to publish the polygon. | |
| geometry_msgs::msg::PolygonStamped | polygon_ |
| Polygon, used for: 1. visualization; 2. storing latest dynamic polygon message. | |
| rclcpp_lifecycle::LifecyclePublisher< geometry_msgs::msg::PolygonStamped >::SharedPtr | polygon_pub_ |
| Polygon publisher for visualization purposes. | |
| std::vector< Point > | poly_ |
| Polygon points (vertices) in a base_frame_id_. | |
Detailed Description
Circle shape implementation. For STOP/SLOWDOWN/LIMIT model it represents zone around the robot while for APPROACH model it represents robot footprint.
Definition at line 34 of file circle.hpp.
Constructor & Destructor Documentation
◆ Circle()
| nav2_collision_monitor::Circle::Circle | ( | const nav2_util::LifecycleNode::WeakPtr & | node, |
| const std::string & | polygon_name, | ||
| const std::shared_ptr< tf2_ros::Buffer > | tf_buffer, | ||
| const std::string & | base_frame_id, | ||
| const tf2::Duration & | transform_tolerance | ||
| ) |
Circle class constructor.
- Parameters
-
node Collision Monitor node pointer polygon_name Name of circle tf_buffer Shared pointer to a TF buffer base_frame_id Robot base frame ID transform_tolerance Transform tolerance
Definition at line 26 of file circle.cpp.
References nav2_collision_monitor::Polygon::logger_, and nav2_collision_monitor::Polygon::polygon_name_.
Member Function Documentation
◆ createSubscription()
|
overrideprotectedvirtual |
Creates polygon or radius topic subscription.
- Parameters
-
polygon_sub_topic Output name of polygon or radius subscription topic. Empty, if no polygon subscription.
Reimplemented from nav2_collision_monitor::Polygon.
Definition at line 129 of file circle.cpp.
References nav2_collision_monitor::Polygon::logger_, nav2_collision_monitor::Polygon::node_, nav2_collision_monitor::Polygon::polygon_name_, nav2_collision_monitor::Polygon::polygon_subscribe_transient_local_, radius_sub_, and radiusCallback().

◆ getParameters()
|
overrideprotectedvirtual |
Supporting routine obtaining polygon-specific ROS-parameters.
- Parameters
-
polygon_sub_topic Input name of polygon subscription topic polygon_pub_topic Output name of polygon or radius publishing topic footprint_topic Output name of footprint topic. For Circle returns empty string, there is no footprint subscription in this class.
- Returns
- True if all parameters were obtained or false in failure case
Reimplemented from nav2_collision_monitor::Polygon.
Definition at line 82 of file circle.cpp.
References nav2_collision_monitor::Polygon::getCommonParameters(), nav2_collision_monitor::Polygon::logger_, nav2_collision_monitor::Polygon::node_, nav2_collision_monitor::Polygon::polygon_name_, radius_, and radius_squared_.

◆ getPointsInside()
|
overridevirtual |
Gets number of points inside circle.
- Parameters
-
points Input array of points to be checked
- Returns
- Number of points inside circle. If there are no points, returns zero value.
Reimplemented from nav2_collision_monitor::Polygon.
Definition at line 61 of file circle.cpp.
References radius_squared_.
◆ getPolygon()
|
overridevirtual |
Gets polygon points, approximated to the circle. To be used in visualization purposes.
- Parameters
-
poly Output polygon points (vertices)
Reimplemented from nav2_collision_monitor::Polygon.
Definition at line 42 of file circle.cpp.
References radius_.
Referenced by updatePolygon().

◆ radiusCallback()
|
protected |
Dynamic circle radius callback.
- Parameters
-
msg Shared pointer to the radius value message
Definition at line 170 of file circle.cpp.
References nav2_collision_monitor::Polygon::logger_, nav2_collision_monitor::Polygon::polygon_name_, and updatePolygon().
Referenced by createSubscription().


◆ updatePolygon()
|
protected |
Updates polygon from radius value.
- Parameters
-
radius New circle radius to update polygon
Definition at line 151 of file circle.cpp.
References getPolygon(), nav2_collision_monitor::Polygon::polygon_, radius_, and radius_squared_.
Referenced by radiusCallback().


The documentation for this class was generated from the following files:
- nav2_collision_monitor/include/nav2_collision_monitor/circle.hpp
- nav2_collision_monitor/src/circle.cpp