Public Member Functions | |
| def | __init__ (self, TrajectoryGeneratorConfigDict config) |
| Union[Trajectory, None] | generate_trajectory (self, FloatNDArray end_point, float start_angle, float end_angle, float primitive_resolution) |
Public Attributes | |
| turning_radius | |
Detailed Description
Handles all the logic for generating trajectories.
Definition at line 29 of file trajectory_generator.py.
Constructor & Destructor Documentation
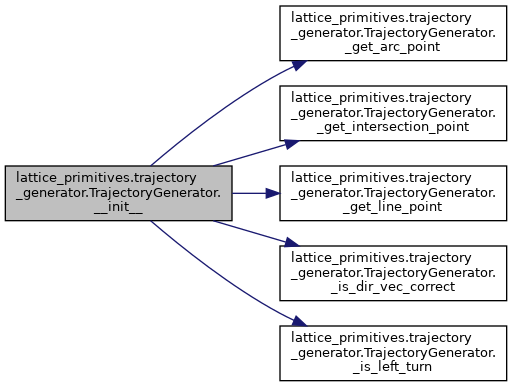
◆ __init__()
| def lattice_primitives.trajectory_generator.TrajectoryGenerator.__init__ | ( | self, | |
| TrajectoryGeneratorConfigDict | config | ||
| ) |
Init TrajectoryGenerator using the user supplied config.
Definition at line 32 of file trajectory_generator.py.
References lattice_primitives.trajectory_generator.TrajectoryGenerator._get_arc_point(), lattice_primitives.trajectory_generator.TrajectoryGenerator._get_intersection_point(), lattice_primitives.trajectory_generator.TrajectoryGenerator._get_line_point(), lattice_primitives.trajectory_generator.TrajectoryGenerator._is_dir_vec_correct(), lattice_primitives.trajectory_generator.TrajectoryGenerator._is_left_turn(), nav2_smac_planner::MotionPrimitive.turning_radius, lattice_primitives.lattice_generator.LatticeGenerator.turning_radius, and lattice_primitives.trajectory_generator.TrajectoryGenerator.turning_radius.
Member Function Documentation
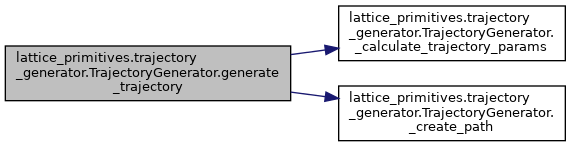
◆ generate_trajectory()
| Union[Trajectory, None] lattice_primitives.trajectory_generator.TrajectoryGenerator.generate_trajectory | ( | self, | |
| FloatNDArray | end_point, | ||
| float | start_angle, | ||
| float | end_angle, | ||
| float | primitive_resolution | ||
| ) |
Create a trajectory from (0,0, start_angle) to (end_point, end_angle).
The trajectory will consist of a path that contains discrete points
that are spaced primitive_resolution apart.
Args
----
end_point: np.array(2,)
The desired end point of the trajectory
start_angle: float
The start angle of the trajectory in radians
end_angle: float
The end angle of the trajectory in radians
primitive_resolution: float
The spacing between points along the trajectory
Returns
-------
Trajectory or None
If a valid trajectory exists then the Trajectory is returned,
otherwise None
Definition at line 531 of file trajectory_generator.py.
References lattice_primitives.trajectory_generator.TrajectoryGenerator._calculate_trajectory_params(), and lattice_primitives.trajectory_generator.TrajectoryGenerator._create_path().
The documentation for this class was generated from the following file:
- nav2_smac_planner/lattice_primitives/trajectory_generator.py