Public Member Functions | |
| bool | generatePath (std::vector< coordsW > &raw_path, std::function< bool()> cancel_checker) |
| it iteratively searches upon the nodes in the queue (open list) until the current node is the goal pose or the size of queue becomes 0 More... | |
| bool | isSafe (const int &cx, const int &cy) const |
| this function checks whether the cost of a point(cx, cy) on the costmap is less than the LETHAL_COST More... | |
| void | setStartAndGoal (const geometry_msgs::msg::PoseStamped &start, const geometry_msgs::msg::PoseStamped &goal) |
| initialises the values of the start and goal points | |
| bool | isUnsafeToPlan () const |
| checks whether the start and goal points have costmap costs greater than LETHAL_COST More... | |
| void | clearStart () |
| Clear Start. | |
Public Attributes | |
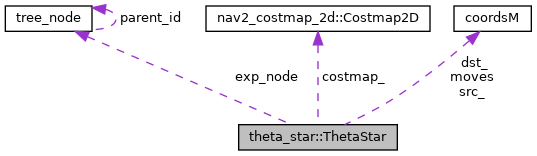
| coordsM | src_ {} |
| coordsM | dst_ {} |
| nav2_costmap_2d::Costmap2D * | costmap_ {} |
| double | w_traversal_cost_ |
| weight on the costmap traversal cost | |
| double | w_euc_cost_ |
| weight on the euclidean distance cost (used for calculations of g_cost) | |
| double | w_heuristic_cost_ |
| weight on the heuristic cost (used for h_cost calculations) | |
| int | how_many_corners_ |
| parameter to set the number of adjacent nodes to be searched on | |
| bool | allow_unknown_ |
| parameter to set weather the planner can plan through unknown space | |
| int | size_x_ |
| the x-directional and y-directional lengths of the map respectively | |
| int | size_y_ |
| int | terminal_checking_interval_ |
| the interval at which the planner checks if it has been cancelled | |
| int | nodes_opened = 0 |
Protected Member Functions | |
| void | resetParent (tree_node *curr_data) |
| it performs a line of sight (los) check between the current node and the parent node of its parent node; if an los is found and the new costs calculated are lesser, then the cost and parent node of the current node is updated More... | |
| void | setNeighbors (const tree_node *curr_data) |
| this function expands the current node More... | |
| bool | losCheck (const int &x0, const int &y0, const int &x1, const int &y1, double &sl_cost) const |
| performs the line of sight check using Bresenham's Algorithm, and has been modified to calculate the traversal cost incurred in a straight line path between the two points whose coordinates are (x0, y0) and (x1, y1) More... | |
| void | backtrace (std::vector< coordsW > &raw_points, const tree_node *curr_n) const |
| it returns the path by backtracking from the goal to the start, by using their parent nodes More... | |
| bool | isSafe (const int &cx, const int &cy, double &cost) const |
| it is an overloaded function to ease the cost calculations while performing the LOS check More... | |
| double | getCost (const int &cx, const int &cy) const |
| double | getTraversalCost (const int &cx, const int &cy) |
| for the point(cx, cy), its traversal cost is calculated by <parameter>*(<actual_traversal_cost_from_costmap>)^2/(<max_cost>)^2 More... | |
| double | getEuclideanCost (const int &ax, const int &ay, const int &bx, const int &by) |
| calculates the piecewise straight line euclidean distances by <euc_cost_parameter>*<euclidean distance between the points (ax, ay) and (bx, by)> More... | |
| double | getHCost (const int &cx, const int &cy) |
| for the point(cx, cy), its heuristic cost is calculated by <heuristic_cost_parameter>*<euclidean distance between the point and goal> More... | |
| bool | withinLimits (const int &cx, const int &cy) const |
| checks if the given coordinates(cx, cy) lies within the map More... | |
| bool | isGoal (const tree_node &this_node) const |
| checks if the coordinates of a node is the goal or not More... | |
| void | initializePosn (int size_inc=0) |
| initialises the node_position_ vector by storing -1 as index for all points(x, y) within the limits of the map More... | |
| void | addIndex (const int &cx, const int &cy, tree_node *node_this) |
| it stores id_this in node_position_ at the index [ size_x_*cy + cx ] More... | |
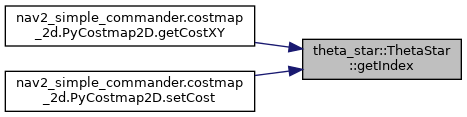
| tree_node * | getIndex (const int &cx, const int &cy) |
| retrieves the pointer of the location at which the data of the point(cx, cy) is stored in nodes_data More... | |
| void | addToNodesData (const int &id_this) |
| this function depending on the size of the nodes_data_ vector allots space to store the data for a node(x, y) More... | |
| void | resetContainers () |
| initialises the values of global variables at beginning of the execution of the generatePath function | |
| void | clearQueue () |
| clears the priority queue after each execution of the generatePath function | |
Protected Attributes | |
| std::vector< tree_node * > | node_position_ |
| std::vector< tree_node > | nodes_data_ |
| std::priority_queue< tree_node *, std::vector< tree_node * >, comp > | queue_ |
| this is the priority queue (open_list) to select the next node to be expanded | |
| int | index_generated_ |
| const coordsM | moves [8] |
| tree_node * | exp_node |
Detailed Description
Definition at line 61 of file theta_star.hpp.
Member Function Documentation
◆ addIndex()
|
inlineprotected |
it stores id_this in node_position_ at the index [ size_x_*cy + cx ]
- Parameters
-
id_this a pointer to the location at which the data of the point(cx, cy) is stored in nodes_data_
Definition at line 280 of file theta_star.hpp.
References node_position_, and size_x_.
◆ addToNodesData()
|
inlineprotected |
this function depending on the size of the nodes_data_ vector allots space to store the data for a node(x, y)
- Parameters
-
id_this is the index at which the data is stored/has to be stored for that node
Definition at line 298 of file theta_star.hpp.
References nodes_data_.
◆ backtrace()
|
protected |
it returns the path by backtracking from the goal to the start, by using their parent nodes
- Parameters
-
raw_points used to return the path thus found curr_id sends in the index of the goal coordinate, as stored in nodes_position
Definition at line 160 of file theta_star.cpp.
◆ generatePath()
| bool theta_star::ThetaStar::generatePath | ( | std::vector< coordsW > & | raw_path, |
| std::function< bool()> | cancel_checker | ||
| ) |
it iteratively searches upon the nodes in the queue (open list) until the current node is the goal pose or the size of queue becomes 0
- Parameters
-
raw_path is used to return the path obtained by executing the algorithm
- Returns
- true if a path is found, false if no path is found in between the start and goal pose
Definition at line 48 of file theta_star.cpp.
◆ getEuclideanCost()
|
inlineprotected |
calculates the piecewise straight line euclidean distances by <euc_cost_parameter>*<euclidean distance between the points (ax, ay) and (bx, by)>
- Returns
- the distance thus calculated
Definition at line 237 of file theta_star.hpp.
References w_euc_cost_.
◆ getHCost()
|
inlineprotected |
for the point(cx, cy), its heuristic cost is calculated by <heuristic_cost_parameter>*<euclidean distance between the point and goal>
- Returns
- the heuristic cost
Definition at line 247 of file theta_star.hpp.
References w_heuristic_cost_.
◆ getIndex()
|
inlineprotected |
retrieves the pointer of the location at which the data of the point(cx, cy) is stored in nodes_data
- Returns
- id_this is the pointer to that location
Definition at line 289 of file theta_star.hpp.
References node_position_, and size_x_.
Referenced by nav2_simple_commander.costmap_2d.PyCostmap2D::getCostXY(), and nav2_simple_commander.costmap_2d.PyCostmap2D::setCost().
◆ getTraversalCost()
|
inlineprotected |
for the point(cx, cy), its traversal cost is calculated by <parameter>*(<actual_traversal_cost_from_costmap>)^2/(<max_cost>)^2
- Returns
- the traversal cost thus calculated
Definition at line 226 of file theta_star.hpp.
References w_traversal_cost_.
◆ initializePosn()
|
protected |
initialises the node_position_ vector by storing -1 as index for all points(x, y) within the limits of the map
- Parameters
-
size_inc is used to increase the number of elements in node_position_ in case the size of the map increases
Definition at line 256 of file theta_star.cpp.
◆ isGoal()
|
inlineprotected |
checks if the coordinates of a node is the goal or not
- Returns
- the result of the check
Definition at line 265 of file theta_star.hpp.
◆ isSafe() [1/2]
|
inline |
this function checks whether the cost of a point(cx, cy) on the costmap is less than the LETHAL_COST
- Returns
- the result of the check
Definition at line 98 of file theta_star.hpp.
References allow_unknown_, and nav2_costmap_2d::Costmap2D::getCost().
Referenced by isUnsafeToPlan().


◆ isSafe() [2/2]
|
inlineprotected |
it is an overloaded function to ease the cost calculations while performing the LOS check
- Parameters
-
cost denotes the total straight line traversal cost; it adds the traversal cost for the node (cx, cy) at every instance; it is also being returned
- Returns
- false if the traversal cost is greater than / equal to the LETHAL_COST and true otherwise
Definition at line 198 of file theta_star.hpp.
References allow_unknown_, nav2_costmap_2d::Costmap2D::getCost(), and w_traversal_cost_.

◆ isUnsafeToPlan()
|
inline |
checks whether the start and goal points have costmap costs greater than LETHAL_COST
- Returns
- true if the cost of any one of the points is greater than LETHAL_COST
Definition at line 116 of file theta_star.hpp.
References isSafe().

◆ losCheck()
|
protected |
performs the line of sight check using Bresenham's Algorithm, and has been modified to calculate the traversal cost incurred in a straight line path between the two points whose coordinates are (x0, y0) and (x1, y1)
- Parameters
-
sl_cost is used to return the cost thus incurred
- Returns
- true if a line of sight exists between the points
Definition at line 180 of file theta_star.cpp.
◆ resetParent()
|
protected |
it performs a line of sight (los) check between the current node and the parent node of its parent node; if an los is found and the new costs calculated are lesser, then the cost and parent node of the current node is updated
- Parameters
-
data of the current node
Definition at line 92 of file theta_star.cpp.
◆ setNeighbors()
|
protected |
this function expands the current node
- Parameters
-
curr_data used to send the data of the current node curr_id used to send the index of the current node as stored in nodes_position_
Definition at line 111 of file theta_star.cpp.
◆ withinLimits()
|
inlineprotected |
checks if the given coordinates(cx, cy) lies within the map
- Returns
- the result of the check
Definition at line 256 of file theta_star.hpp.
Member Data Documentation
◆ index_generated_
|
protected |
it is a counter like variable used to generate consecutive indices such that the data for all the nodes (in open and closed lists) could be stored consecutively in nodes_data_
Definition at line 147 of file theta_star.hpp.
◆ moves
|
protected |
Definition at line 149 of file theta_star.hpp.
◆ node_position_
|
protected |
for the coordinates (x,y), it stores at node_position_[size_x_ * y + x], the pointer to the location at which the data of the node is present in nodes_data_ it is initialised with size_x_ * size_y_ elements and its number of elements increases to account for a change in map size
Definition at line 133 of file theta_star.hpp.
Referenced by addIndex(), and getIndex().
◆ nodes_data_
|
protected |
the vector nodes_data_ stores the coordinates, costs and index of the parent node, and whether or not the node is present in queue_, for all the nodes searched it is initialised with no elements and its size increases depending on the number of nodes searched
Definition at line 139 of file theta_star.hpp.
Referenced by addToNodesData().
The documentation for this class was generated from the following files:
- nav2_theta_star_planner/include/nav2_theta_star_planner/theta_star.hpp
- nav2_theta_star_planner/src/theta_star.cpp