Layer to convolve costmap by robot's radius or footprint to prevent collisions and largely simply collision checking. More...
#include <nav2_costmap_2d/include/nav2_costmap_2d/inflation_layer.hpp>
Public Types | |
| typedef std::recursive_mutex | mutex_t |
Public Member Functions | |
| InflationLayer () | |
| A constructor. | |
| ~InflationLayer () | |
| A destructor. | |
| void | onInitialize () override |
| Initialization process of layer on startup. | |
| void | updateBounds (double robot_x, double robot_y, double robot_yaw, double *min_x, double *min_y, double *max_x, double *max_y) override |
| Update the bounds of the master costmap by this layer's update dimensions. More... | |
| void | updateCosts (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) override |
| Update the costs in the master costmap in the window. More... | |
| void | matchSize () override |
| Match the size of the master costmap. | |
| bool | isClearable () override |
| If clearing operations should be processed on this layer or not. | |
| void | reset () override |
| Reset this costmap. | |
| unsigned char | computeCost (double distance) const |
| Given a distance, compute a cost. More... | |
| mutex_t * | getMutex () |
| Get the mutex of the inflation inforamtion. | |
| double | getCostScalingFactor () |
| double | getInflationRadius () |
 Public Member Functions inherited from nav2_costmap_2d::Layer Public Member Functions inherited from nav2_costmap_2d::Layer | |
| Layer () | |
| A constructor. | |
| virtual | ~Layer () |
| A destructor. | |
| void | initialize (LayeredCostmap *parent, std::string name, tf2_ros::Buffer *tf, const nav2_util::LifecycleNode::WeakPtr &node, rclcpp::CallbackGroup::SharedPtr callback_group) |
| Initialization process of layer on startup. | |
| virtual void | deactivate () |
| Stop publishers. | |
| virtual void | activate () |
| Restart publishers if they've been stopped. | |
| std::string | getName () const |
| Get the name of the costmap layer. | |
| bool | isCurrent () const |
| Check to make sure all the data in the layer is up to date. If the layer is not up to date, then it may be unsafe to plan using the data from this layer, and the planner may need to know. More... | |
| bool | isEnabled () const |
| Gets whether the layer is enabled. | |
| const std::vector< geometry_msgs::msg::Point > & | getFootprint () const |
| Convenience function for layered_costmap_->getFootprint(). | |
| void | declareParameter (const std::string ¶m_name, const rclcpp::ParameterValue &value) |
| Convenience functions for declaring ROS parameters. | |
| void | declareParameter (const std::string ¶m_name, const rclcpp::ParameterType ¶m_type) |
| Convenience functions for declaring ROS parameters. | |
| bool | hasParameter (const std::string ¶m_name) |
| Convenience functions for declaring ROS parameters. | |
| std::string | getFullName (const std::string ¶m_name) |
| Convenience functions for declaring ROS parameters. | |
Static Public Member Functions | |
| static std::shared_ptr< nav2_costmap_2d::InflationLayer > | getInflationLayer (std::shared_ptr< nav2_costmap_2d::Costmap2DROS > &costmap_ros, const std::string layer_name="") |
Protected Member Functions | |
| void | onFootprintChanged () override |
| Process updates on footprint changes to the inflation layer. | |
| double | distanceLookup (unsigned int mx, unsigned int my, unsigned int src_x, unsigned int src_y) |
| Lookup pre-computed distances. More... | |
| unsigned char | costLookup (unsigned int mx, unsigned int my, unsigned int src_x, unsigned int src_y) |
| Lookup pre-computed costs. More... | |
| void | computeCaches () |
| Compute cached dsitances. | |
| int | generateIntegerDistances () |
| Compute cached dsitances. | |
| unsigned int | cellDistance (double world_dist) |
| Compute cached dsitances. | |
| void | enqueue (unsigned int index, unsigned int mx, unsigned int my, unsigned int src_x, unsigned int src_y) |
| Enqueue new cells in cache distance update search. More... | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
Protected Attributes | |
| double | inflation_radius_ |
| double | inscribed_radius_ |
| double | cost_scaling_factor_ |
| bool | inflate_unknown_ |
| bool | inflate_around_unknown_ |
| unsigned int | cell_inflation_radius_ |
| unsigned int | cached_cell_inflation_radius_ |
| std::vector< std::vector< CellData > > | inflation_cells_ |
| double | resolution_ |
| std::vector< bool > | seen_ |
| std::vector< unsigned char > | cached_costs_ |
| std::vector< double > | cached_distances_ |
| std::vector< std::vector< int > > | distance_matrix_ |
| unsigned int | cache_length_ |
| double | last_min_x_ |
| double | last_min_y_ |
| double | last_max_x_ |
| double | last_max_y_ |
| bool | need_reinflation_ |
| mutex_t * | access_ |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| Protected Attributes inherited from nav2_costmap_2d::Layer | |
| LayeredCostmap * | layered_costmap_ |
| std::string | name_ |
| tf2_ros::Buffer * | tf_ |
| rclcpp::CallbackGroup::SharedPtr | callback_group_ |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | node_ |
| rclcpp::Clock::SharedPtr | clock_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("nav2_costmap_2d")} |
| bool | current_ |
| bool | enabled_ |
| std::unordered_set< std::string > | local_params_ |
Detailed Description
Layer to convolve costmap by robot's radius or footprint to prevent collisions and largely simply collision checking.
Definition at line 82 of file inflation_layer.hpp.
Member Function Documentation
◆ computeCost()
|
inline |
Given a distance, compute a cost.
- Parameters
-
distance The distance from an obstacle in cells
- Returns
- A cost value for the distance
Definition at line 149 of file inflation_layer.hpp.
Referenced by computeCaches().

◆ costLookup()
|
inlineprotected |
Lookup pre-computed costs.
- Parameters
-
mx The x coordinate of the current cell my The y coordinate of the current cell src_x The x coordinate of the source cell src_y The y coordinate of the source cell
- Returns
Definition at line 236 of file inflation_layer.hpp.
Referenced by updateCosts().

◆ distanceLookup()
|
inlineprotected |
Lookup pre-computed distances.
- Parameters
-
mx The x coordinate of the current cell my The y coordinate of the current cell src_x The x coordinate of the source cell src_y The y coordinate of the source cell
- Returns
Definition at line 219 of file inflation_layer.hpp.
Referenced by enqueue().

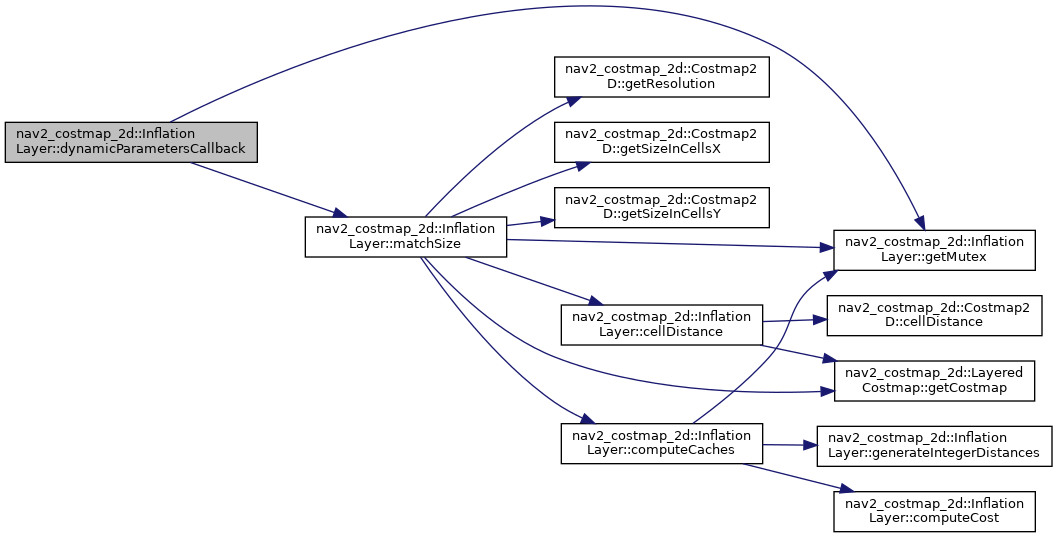
◆ dynamicParametersCallback()
|
protected |
Callback executed when a parameter change is detected.
- Parameters
-
event ParameterEvent message
Definition at line 436 of file inflation_layer.cpp.
References getMutex(), and matchSize().
Referenced by onInitialize().

◆ enqueue()
|
inlineprotected |
Enqueue new cells in cache distance update search.
Given an index of a cell in the costmap, place it into a list pending for obstacle inflation.
- Parameters
-
grid The costmap index The index of the cell mx The x coordinate of the cell (can be computed from the index, but saves time to store it) my The y coordinate of the cell (can be computed from the index, but saves time to store it) src_x The x index of the obstacle point inflation started at src_y The y index of the obstacle point inflation started at
Definition at line 333 of file inflation_layer.cpp.
References distanceLookup().
Referenced by updateCosts().


◆ updateBounds()
|
overridevirtual |
Update the bounds of the master costmap by this layer's update dimensions.
- Parameters
-
robot_x X pose of robot robot_y Y pose of robot robot_yaw Robot orientation min_x X min map coord of the window to update min_y Y min map coord of the window to update max_x X max map coord of the window to update max_y Y max map coord of the window to update
Implements nav2_costmap_2d::Layer.
Definition at line 136 of file inflation_layer.cpp.
References getMutex().

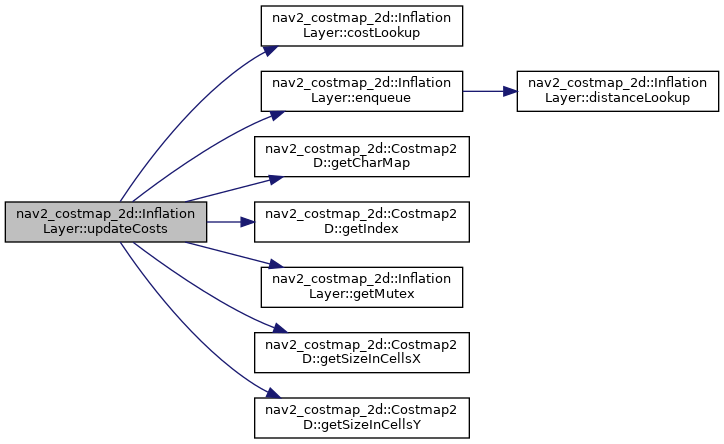
◆ updateCosts()
|
overridevirtual |
Update the costs in the master costmap in the window.
- Parameters
-
master_grid The master costmap grid to update min_x X min map coord of the window to update min_y Y min map coord of the window to update max_x X max map coord of the window to update max_y Y max map coord of the window to update
Implements nav2_costmap_2d::Layer.
Definition at line 194 of file inflation_layer.cpp.
References costLookup(), enqueue(), nav2_costmap_2d::Costmap2D::getCharMap(), nav2_costmap_2d::Costmap2D::getIndex(), getMutex(), nav2_costmap_2d::Costmap2D::getSizeInCellsX(), and nav2_costmap_2d::Costmap2D::getSizeInCellsY().
The documentation for this class was generated from the following files:
- nav2_costmap_2d/include/nav2_costmap_2d/inflation_layer.hpp
- nav2_costmap_2d/plugins/inflation_layer.cpp