Public Member Functions | |
| def | arc_length (self) |
| def | start_straight_length (self) |
| def | end_straight_length (self) |
| def | total_length (self) |
Static Public Member Functions | |
| def | no_arc (end_point, start_angle, end_angle) |
Detailed Description
A dataclass that holds the data needed to create the path for a trajectory.
turning_radius: The radius of the circle used to generate
the arc of the path
x_offset: The x coordinate of the circle used to generate
the arc of the path
y_offset: They y coordinate of the circle used to generate
the arc of the path
end_point: The end coordinate of the path
start_angle: The starting angle of the path
- given in radians from -pi to pi where 0 radians is along
the positive x axis
end_angle: The end angle of the path
- given in radians from -pi to pi where 0 radians is along
the positive x axis
left_turn: Whether the arc in the path turns to the left
arc_start_point: Coordinates of the starting position of the arc
arc_end_point: Coordinates of the ending position of the arc
Definition at line 23 of file trajectory.py.
Member Function Documentation
◆ arc_length()
| def trajectory.TrajectoryParameters.arc_length | ( | self | ) |
Arc length of the trajectory.
Definition at line 57 of file trajectory.py.
References nav2_smac_planner::MotionPrimitive.end_angle, nav2_smac_planner::MotionPrimitive.left_turn, nav2_smac_planner::MotionPrimitive.start_angle, nav2_smac_planner::MotionPrimitive.turning_radius, lattice_generator.LatticeGenerator.turning_radius, and trajectory_generator.TrajectoryGenerator.turning_radius.
Referenced by trajectory.TrajectoryParameters.total_length().

◆ end_straight_length()
| def trajectory.TrajectoryParameters.end_straight_length | ( | self | ) |
Length of the straight line from arc to end.
Definition at line 69 of file trajectory.py.
Referenced by trajectory.TrajectoryParameters.total_length().

◆ no_arc()
|
static |
Create the parameters for a trajectory with no arc.
Definition at line 80 of file trajectory.py.
◆ start_straight_length()
| def trajectory.TrajectoryParameters.start_straight_length | ( | self | ) |
Length of the straight line from start to arc.
Definition at line 64 of file trajectory.py.
Referenced by trajectory.TrajectoryParameters.total_length().

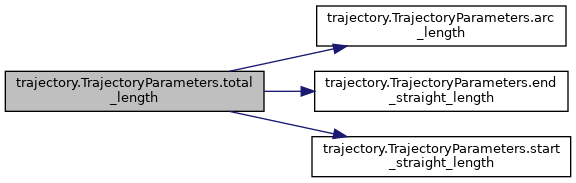
◆ total_length()
| def trajectory.TrajectoryParameters.total_length | ( | self | ) |
Total length of trajectory.
Definition at line 74 of file trajectory.py.
References nav2_smac_planner::MotionPrimitive.arc_length, trajectory.TrajectoryParameters.arc_length(), trajectory.TrajectoryParameters.end_straight_length(), and trajectory.TrajectoryParameters.start_straight_length().
The documentation for this class was generated from the following file:
- nav2_smac_planner/lattice_primitives/trajectory.py