Public Member Functions | |
| def | __init__ (self) |
| def | footprintCost (self, Polygon footprint) |
| def | lineCost (self, x0, x1, y0, y1, step_size=0.5) |
| def | worldToMapValidated (self, float wx, float wy) |
| def | pointCost (self, int x, int y) |
| def | setCostmap (self, PyCostmap2D costmap) |
| def | footprintCostAtPose (self, float x, float y, float theta, Polygon footprint) |
Public Attributes | |
| costmap_ | |
Detailed Description
FootprintCollisionChecker. FootprintCollisionChecker Class for getting the cost and checking the collisions of a Footprint
Definition at line 37 of file footprint_collision_checker.py.
Constructor & Destructor Documentation
◆ __init__()
| def nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.__init__ | ( | self | ) |
Initialize the FootprintCollisionChecker Object.
Definition at line 45 of file footprint_collision_checker.py.
References nav2_costmap_2d::ClearCostmapService.costmap_, nav2_costmap_2d::Costmap2D.costmap_, nav2_costmap_2d::Costmap2D::MarkCell.costmap_, nav2_costmap_2d::Costmap2D::PolygonOutlineCells.costmap_, nav2_costmap_2d::Costmap2DPublisher.costmap_, nav2_costmap_2d::CostmapSubscriber.costmap_, nav2_costmap_2d::FootprintCollisionChecker< std::shared_ptr< nav2_costmap_2d::Costmap2D > >.costmap_, nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * >.costmap_, nav2_costmap_2d::FootprintCollisionChecker< CostmapT >.costmap_, costmap_queue::CostmapQueue.costmap_, dwb_critics::BaseObstacleCritic.costmap_, dwb_critics::MapGridCritic.costmap_, mppi::critics::CriticFunction.costmap_, mppi::Optimizer.costmap_, mppi::PathHandler.costmap_, nav2_navfn_planner::NavfnPlanner.costmap_, nav2_planner::PlannerServer.costmap_, nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController.costmap_, nav2_route::GoalIntentSearch::BreadthFirstSearch.costmap_, nav2_route::GoalIntentSearch::LoSCollisionChecker.costmap_, nav2_route::CostmapScorer.costmap_, nav2_route::CollisionMonitor.costmap_, nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.costmap_, nav2_system_tests::PlannerTester.costmap_, theta_star::ThetaStar.costmap_, and nav2_voxel_grid::VoxelGrid::ClearVoxelInMap.costmap_.
Member Function Documentation
◆ footprintCost()
| def nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.footprintCost | ( | self, | |
| Polygon | footprint | ||
| ) |
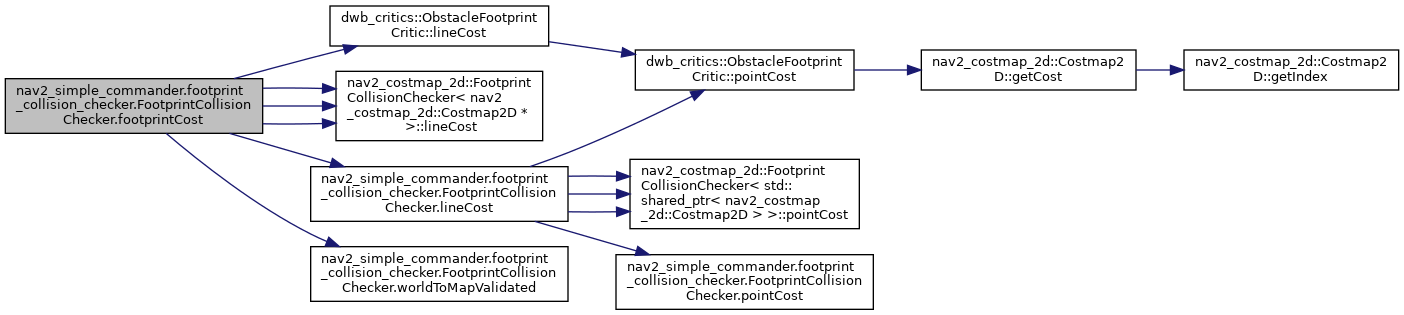
Iterate over all the points in a footprint and check for collision.
Args
----
footprint (Polygon): The footprint to calculate the collision cost for
Returns
-------
LETHAL_OBSTACLE (int): If collision was found, 254 will be returned
footprint_cost (float): The maximum cost found in the footprint points
Definition at line 50 of file footprint_collision_checker.py.
References dwb_critics::ObstacleFootprintCritic.lineCost(), nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * >.lineCost(), nav2_costmap_2d::FootprintCollisionChecker< std::shared_ptr< nav2_costmap_2d::Costmap2D > >.lineCost(), nav2_costmap_2d::FootprintCollisionChecker< CostmapT >.lineCost(), nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.lineCost(), and nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.worldToMapValidated().
Referenced by nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.footprintCostAtPose().

◆ footprintCostAtPose()
| def nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.footprintCostAtPose | ( | self, | |
| float | x, | ||
| float | y, | ||
| float | theta, | ||
| Polygon | footprint | ||
| ) |
Get the cost of a footprint at a specific Pose in map coordinates.
Args
----
x (float): map coordinate X
y (float): map coordinate Y
theta (float): absolute rotation angle of the footprint
footprint (Polygon): the footprint to calculate its cost at the given Pose
Returns
-------
LETHAL_OBSTACLE (int): If collision was found, 254 will be returned
footprint_cost (float): The maximum cost found in the footprint points
Definition at line 189 of file footprint_collision_checker.py.
References nav2_costmap_2d::FootprintCollisionChecker< std::shared_ptr< nav2_costmap_2d::Costmap2D > >.footprintCost(), nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * >.footprintCost(), nav2_costmap_2d::FootprintCollisionChecker< CostmapT >.footprintCost(), and nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.footprintCost().

◆ lineCost()
| def nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.lineCost | ( | self, | |
| x0, | |||
| x1, | |||
| y0, | |||
| y1, | |||
step_size = 0.5 |
|||
| ) |
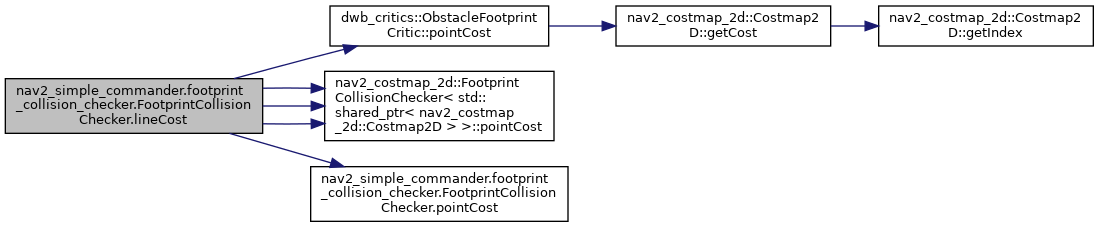
Iterate over all the points along a line and check for collision.
Args
----
x0 (float): Abscissa of the initial point in map coordinates
y0 (float): Ordinate of the initial point in map coordinates
x1 (float): Abscissa of the final point in map coordinates
y1 (float): Ordinate of the final point in map coordinates
step_size (float): Optional, Increments' resolution, defaults to 0.5
Returns
-------
LETHAL_OBSTACLE (int): If collision was found, 254 will be returned
line_cost (float): The maximum cost found in the line points
Definition at line 93 of file footprint_collision_checker.py.
References dwb_critics::ObstacleFootprintCritic.pointCost(), nav2_costmap_2d::FootprintCollisionChecker< std::shared_ptr< nav2_costmap_2d::Costmap2D > >.pointCost(), nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * >.pointCost(), nav2_costmap_2d::FootprintCollisionChecker< CostmapT >.pointCost(), and nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.pointCost().
Referenced by nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.footprintCost().

◆ pointCost()
| def nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.pointCost | ( | self, | |
| int | x, | ||
| int | y | ||
| ) |
Get the cost of a point in the costmap using map coordinates XY.
Args
----
mx (int): map coordinate X
my (int): map coordinate Y
Returns
-------
np.uint8: cost of a point
Definition at line 153 of file footprint_collision_checker.py.
References nav2_costmap_2d::ClearCostmapService.costmap_, nav2_costmap_2d::Costmap2D.costmap_, nav2_costmap_2d::Costmap2D::MarkCell.costmap_, nav2_costmap_2d::Costmap2D::PolygonOutlineCells.costmap_, nav2_costmap_2d::Costmap2DPublisher.costmap_, nav2_costmap_2d::CostmapSubscriber.costmap_, nav2_costmap_2d::FootprintCollisionChecker< std::shared_ptr< nav2_costmap_2d::Costmap2D > >.costmap_, nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * >.costmap_, nav2_costmap_2d::FootprintCollisionChecker< CostmapT >.costmap_, costmap_queue::CostmapQueue.costmap_, dwb_critics::BaseObstacleCritic.costmap_, dwb_critics::MapGridCritic.costmap_, mppi::critics::CriticFunction.costmap_, mppi::Optimizer.costmap_, mppi::PathHandler.costmap_, nav2_navfn_planner::NavfnPlanner.costmap_, nav2_planner::PlannerServer.costmap_, nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController.costmap_, nav2_route::GoalIntentSearch::BreadthFirstSearch.costmap_, nav2_route::GoalIntentSearch::LoSCollisionChecker.costmap_, nav2_route::CostmapScorer.costmap_, nav2_route::CollisionMonitor.costmap_, nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.costmap_, nav2_system_tests::PlannerTester.costmap_, theta_star::ThetaStar.costmap_, and nav2_voxel_grid::VoxelGrid::ClearVoxelInMap.costmap_.
Referenced by nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.lineCost().

◆ setCostmap()
| def nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.setCostmap | ( | self, | |
| PyCostmap2D | costmap | ||
| ) |
Specify which costmap to use.
Args
----
costmap (PyCostmap2D): costmap to use in the object's methods
Returns
-------
None
Definition at line 173 of file footprint_collision_checker.py.
References nav2_costmap_2d::ClearCostmapService.costmap_, nav2_costmap_2d::Costmap2D.costmap_, nav2_costmap_2d::Costmap2D::MarkCell.costmap_, nav2_costmap_2d::Costmap2D::PolygonOutlineCells.costmap_, nav2_costmap_2d::Costmap2DPublisher.costmap_, nav2_costmap_2d::CostmapSubscriber.costmap_, nav2_costmap_2d::FootprintCollisionChecker< std::shared_ptr< nav2_costmap_2d::Costmap2D > >.costmap_, nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * >.costmap_, nav2_costmap_2d::FootprintCollisionChecker< CostmapT >.costmap_, costmap_queue::CostmapQueue.costmap_, dwb_critics::BaseObstacleCritic.costmap_, dwb_critics::MapGridCritic.costmap_, mppi::critics::CriticFunction.costmap_, mppi::Optimizer.costmap_, mppi::PathHandler.costmap_, nav2_navfn_planner::NavfnPlanner.costmap_, nav2_planner::PlannerServer.costmap_, nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController.costmap_, nav2_route::GoalIntentSearch::BreadthFirstSearch.costmap_, nav2_route::GoalIntentSearch::LoSCollisionChecker.costmap_, nav2_route::CostmapScorer.costmap_, nav2_route::CollisionMonitor.costmap_, nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.costmap_, nav2_system_tests::PlannerTester.costmap_, theta_star::ThetaStar.costmap_, and nav2_voxel_grid::VoxelGrid::ClearVoxelInMap.costmap_.
◆ worldToMapValidated()
| def nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.worldToMapValidated | ( | self, | |
| float | wx, | ||
| float | wy | ||
| ) |
Get the map coordinate XY using world coordinate XY.
Args
----
wx (float): world coordinate X
wy (float): world coordinate Y
Returns
-------
None: if coordinates are invalid
tuple of int: mx, my (if coordinates are valid)
mx (int): map coordinate X
my (int): map coordinate Y
Definition at line 130 of file footprint_collision_checker.py.
References nav2_costmap_2d::ClearCostmapService.costmap_, nav2_costmap_2d::Costmap2D.costmap_, nav2_costmap_2d::Costmap2D::MarkCell.costmap_, nav2_costmap_2d::Costmap2D::PolygonOutlineCells.costmap_, nav2_costmap_2d::Costmap2DPublisher.costmap_, nav2_costmap_2d::CostmapSubscriber.costmap_, nav2_costmap_2d::FootprintCollisionChecker< std::shared_ptr< nav2_costmap_2d::Costmap2D > >.costmap_, nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * >.costmap_, nav2_costmap_2d::FootprintCollisionChecker< CostmapT >.costmap_, costmap_queue::CostmapQueue.costmap_, dwb_critics::BaseObstacleCritic.costmap_, dwb_critics::MapGridCritic.costmap_, mppi::critics::CriticFunction.costmap_, mppi::Optimizer.costmap_, mppi::PathHandler.costmap_, nav2_navfn_planner::NavfnPlanner.costmap_, nav2_planner::PlannerServer.costmap_, nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController.costmap_, nav2_route::GoalIntentSearch::BreadthFirstSearch.costmap_, nav2_route::GoalIntentSearch::LoSCollisionChecker.costmap_, nav2_route::CostmapScorer.costmap_, nav2_route::CollisionMonitor.costmap_, nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.costmap_, nav2_system_tests::PlannerTester.costmap_, theta_star::ThetaStar.costmap_, and nav2_voxel_grid::VoxelGrid::ClearVoxelInMap.costmap_.
Referenced by nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker.footprintCost().

The documentation for this class was generated from the following file:
- nav2_simple_commander/nav2_simple_commander/footprint_collision_checker.py