Structure which encapsulates the options for creating a rcl_node_t. More...
#include <rcl/node_options.h>
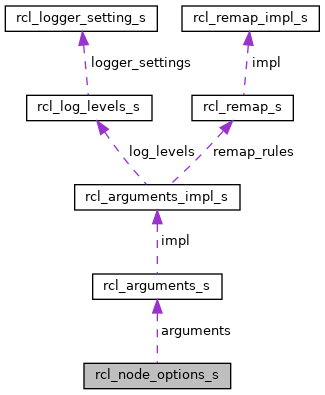
Collaboration diagram for rcl_node_options_s:
Public Attributes | |
| rcl_allocator_t | allocator |
| If true, no parameter infrastructure will be setup. More... | |
| bool | use_global_arguments |
| If false then only use arguments in this struct, otherwise use global arguments also. | |
| rcl_arguments_t | arguments |
| Command line arguments that apply only to this node. | |
| bool | enable_rosout |
| Flag to enable rosout for this node. | |
| rmw_qos_profile_t | rosout_qos |
| Middleware quality of service settings for /rosout. | |
Detailed Description
Structure which encapsulates the options for creating a rcl_node_t.
Definition at line 34 of file node_options.h.
Member Data Documentation
◆ allocator
| rcl_allocator_t rcl_node_options_s::allocator |
If true, no parameter infrastructure will be setup.
Custom allocator used for internal allocations.
Definition at line 44 of file node_options.h.
Referenced by rcl_logging_rosout_init_publisher_for_node(), rcl_node_fini(), rcl_node_get_default_options(), rcl_node_init(), rcl_node_options_copy(), and rcl_node_options_fini().
The documentation for this struct was generated from the following file:
- rcl/include/rcl/node_options.h