Inheritance diagram for rclcpp::experimental::SubscriptionROSMsgIntraProcessBuffer< RosMessageT, Alloc, Deleter >:
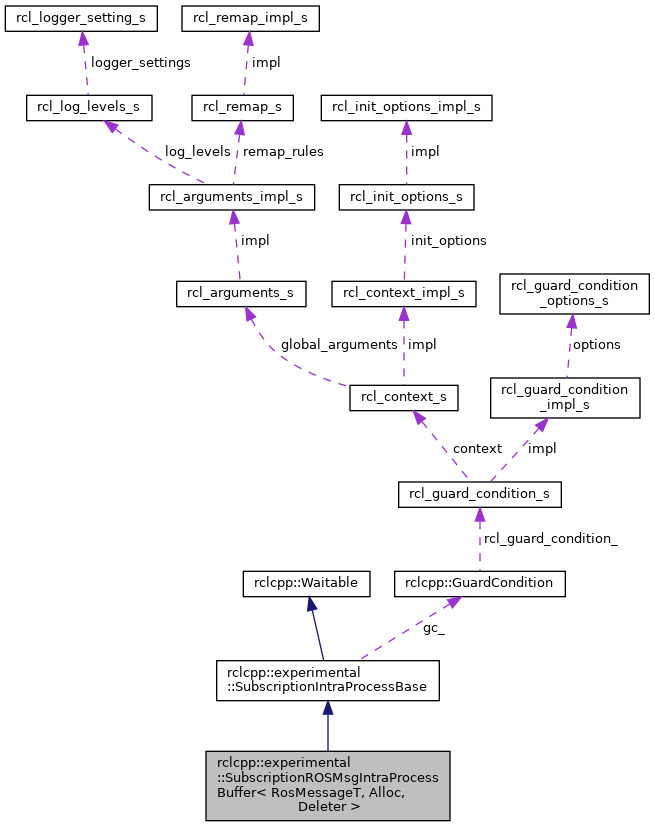
Collaboration diagram for rclcpp::experimental::SubscriptionROSMsgIntraProcessBuffer< RosMessageT, Alloc, Deleter >:
Public Types | |
| using | ROSMessageTypeAllocatorTraits = allocator::AllocRebind< RosMessageT, Alloc > |
| using | ROSMessageTypeAllocator = typename ROSMessageTypeAllocatorTraits::allocator_type |
| using | ROSMessageTypeDeleter = allocator::Deleter< ROSMessageTypeAllocator, RosMessageT > |
| using | ConstMessageSharedPtr = std::shared_ptr< const RosMessageT > |
| using | MessageUniquePtr = std::unique_ptr< RosMessageT, ROSMessageTypeDeleter > |
 Public Types inherited from rclcpp::experimental::SubscriptionIntraProcessBase Public Types inherited from rclcpp::experimental::SubscriptionIntraProcessBase | |
| enum class | EntityType : std::size_t { Subscription } |
Public Member Functions | |
| SubscriptionROSMsgIntraProcessBuffer (rclcpp::Context::SharedPtr context, const std::string &topic_name, const rclcpp::QoS &qos_profile) | |
| virtual void | provide_intra_process_message (ConstMessageSharedPtr message)=0 |
| virtual void | provide_intra_process_message (MessageUniquePtr message)=0 |
| Public Member Functions inherited from rclcpp::experimental::SubscriptionIntraProcessBase | |
| RCLCPP_PUBLIC | SubscriptionIntraProcessBase (rclcpp::Context::SharedPtr context, const std::string &topic_name, const rclcpp::QoS &qos_profile) |
| RCLCPP_PUBLIC size_t | get_number_of_ready_guard_conditions () override |
| Get the number of ready guard_conditions. More... | |
| RCLCPP_PUBLIC void | add_to_wait_set (rcl_wait_set_t &wait_set) override |
| Add the Waitable to a wait set. More... | |
| virtual RCLCPP_PUBLIC size_t | available_capacity () const =0 |
| RCLCPP_PUBLIC bool | is_durability_transient_local () const |
| bool | is_ready (const rcl_wait_set_t &wait_set) override=0 |
| Check if the Waitable is ready. More... | |
| std::shared_ptr< void > | take_data () override=0 |
Take the data so that it can be consumed with execute. More... | |
| std::shared_ptr< void > | take_data_by_entity_id (size_t id) override |
Take the data so that it can be consumed with execute. More... | |
| void | execute (const std::shared_ptr< void > &data) override=0 |
| Execute data that is passed in. More... | |
| virtual bool | use_take_shared_method () const =0 |
| RCLCPP_PUBLIC const char * | get_topic_name () const |
| RCLCPP_PUBLIC QoS | get_actual_qos () const |
| void | set_on_ready_callback (std::function< void(size_t, int)> callback) override |
| Set a callback to be called when each new message arrives. More... | |
| void | clear_on_ready_callback () override |
| Unset the callback registered for new messages, if any. | |
| Public Member Functions inherited from rclcpp::Waitable | |
| virtual RCLCPP_PUBLIC size_t | get_number_of_ready_subscriptions () |
| Get the number of ready subscriptions. More... | |
| virtual RCLCPP_PUBLIC size_t | get_number_of_ready_timers () |
| Get the number of ready timers. More... | |
| virtual RCLCPP_PUBLIC size_t | get_number_of_ready_clients () |
| Get the number of ready clients. More... | |
| virtual RCLCPP_PUBLIC size_t | get_number_of_ready_events () |
| Get the number of ready events. More... | |
| virtual RCLCPP_PUBLIC size_t | get_number_of_ready_services () |
| Get the number of ready services. More... | |
| virtual RCLCPP_PUBLIC void | add_to_wait_set (rcl_wait_set_t *wait_set) |
| Deprecated. More... | |
| virtual RCLCPP_PUBLIC bool | is_ready (rcl_wait_set_t *wait_set) |
| Deprecated. More... | |
| virtual RCLCPP_PUBLIC void | execute (std::shared_ptr< void > &data) |
| Deprecated. More... | |
| RCLCPP_PUBLIC bool | exchange_in_use_by_wait_set_state (bool in_use_state) |
| Exchange the "in use by wait set" state for this timer. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from rclcpp::experimental::SubscriptionIntraProcessBase | |
| virtual void | trigger_guard_condition ()=0 |
| void | invoke_on_new_message () |
| Protected Attributes inherited from rclcpp::experimental::SubscriptionIntraProcessBase | |
| std::recursive_mutex | callback_mutex_ |
| std::function< void(size_t)> | on_new_message_callback_ {nullptr} |
| size_t | unread_count_ {0} |
| rclcpp::GuardCondition | gc_ |
Detailed Description
template<typename RosMessageT, typename Alloc = std::allocator<void>, typename Deleter = std::default_delete<void>>
class rclcpp::experimental::SubscriptionROSMsgIntraProcessBuffer< RosMessageT, Alloc, Deleter >
Definition at line 38 of file ros_message_intra_process_buffer.hpp.
The documentation for this class was generated from the following file:
- rclcpp/include/rclcpp/experimental/ros_message_intra_process_buffer.hpp